Isaac Sim 3. 导入模型和Dynamic Control
目录
1. 导入模型
1.1 从过去保存的stage导入
1.2 使用代码导入单个Franka机器人
1.3 使用代码导入多个Franka机器人
编辑
2. 控制单个Franka机械臂
2.1 位置控制
2.2 单自由度位置控制
2.2 速度控制
2.3 单自由度速度控制
2.4 力矩控制
3. 信息获取
3.1 获取单个Franka状态
3.2 获取物体状态
API链接:
Dynamic Control [omni.isaac.dynamic_control] — isaac_sim 2022.2.1-beta.29 documentation
使用示例:
Dynamic Control — Omniverse Robotics documentation
1. 导入模型
1.1 从过去保存的stage导入
这一节中,各操作使用Sim内置的Python Script运行调试。
从文件系统可以看到,已经有一个stage1.usd保存在EnvFrank里,直接拖到界面中。

在Dynamic Control — Omniverse Robotics documentation给出了基本的读取,控制关节操作。但是,其对应的操作是默认Franka机器人在World下。控制stage1中的Franka机器人,需要修改引用为:
articulation = dc.get_articulation("/World/stage1/Franka")注意运行前需要启动环境仿真。
测试代码为:
from omni.isaac.dynamic_control import _dynamic_control
import numpy as np
dc = _dynamic_control.acquire_dynamic_control_interface()
print(dc)
articulation = dc.get_articulation("/World/stage1/Franka")dc.wake_up_articulation(articulation)
joint_angles = [np.random.rand(9) * 2 - 1]
dc.set_articulation_dof_position_targets(articulation, joint_angles)
该代码给Franka的9个自由度进行了随机的一次运动。
1.2 使用代码导入单个Franka机器人
首先清除界面,File->New 或者 New From Stage Template。(或者重启Sim,不然可能会加载不出ground plane)
参考示例 standalone_examplesapiomni.isaac.coreadd_frankas.py
from omni.isaac.core import World
from omni.isaac.core.robots import Robot
from omni.isaac.core.utils.stage import add_reference_to_stage
from omni.isaac.core.utils.nucleus import get_assets_root_pathmy_world = World(stage_units_in_meters=1.0)
my_world.scene.add_default_ground_plane()assets_root_path = get_assets_root_path()
asset_path = assets_root_path + "/Isaac/Robots/Franka/franka_alt_fingers.usd"
add_reference_to_stage(usd_path=asset_path, prim_path="/World/Franka_1")articulated_system_1 = my_world.scene.add(Robot(prim_path="/World/Franka_1", name="my_franka_1"))运行结果:

1.3 使用代码导入多个Franka机器人
参考示例:standalone_examplesapiomni.isaac.clonerclone_ants.py
注意,如果在Sim内运行示例代码时ants掉落,可能default ground plane没有加载,建议重启Sim。
将Ant替换为Franka后的代码:
import numpy as np
import omni
from omni.isaac.core import World
from omni.isaac.core.articulations import ArticulationView
from omni.isaac.core.utils.stage import add_reference_to_stage, get_stage_units
from omni.isaac.core.utils.nucleus import get_assets_root_path
from omni.isaac.cloner import GridClonermy_world = World(stage_units_in_meters=1.0)
my_world.scene.add_ground_plane()assets_root_path = get_assets_root_path()
# create initial robot
asset_path = assets_root_path + "/Isaac/Robots/Franka/franka_alt_fingers.usd"
add_reference_to_stage(usd_path=asset_path, prim_path="/World/Franka/Franka_0")# create GridCloner instance
cloner = GridCloner(spacing=2)# generate paths for clones
target_paths = cloner.generate_paths("/World/Franka/Franka",8)# clone
position_offsets = np.array([[0, 0, 0]] * 8)
cloner.clone(source_prim_path="/World/Franka/Franka_0",prim_paths=target_paths,position_offsets=position_offsets,replicate_physics=True,base_env_path="/World/Franka",
)# create ArticulationView
ants = ArticulationView(prim_paths_expr="/World/Franka/.*/torso", name="Franka_view")
my_world.scene.add(ants)my_world.reset()
for i in range(1000):print(ants.get_world_poses())my_world.step()运行结果:
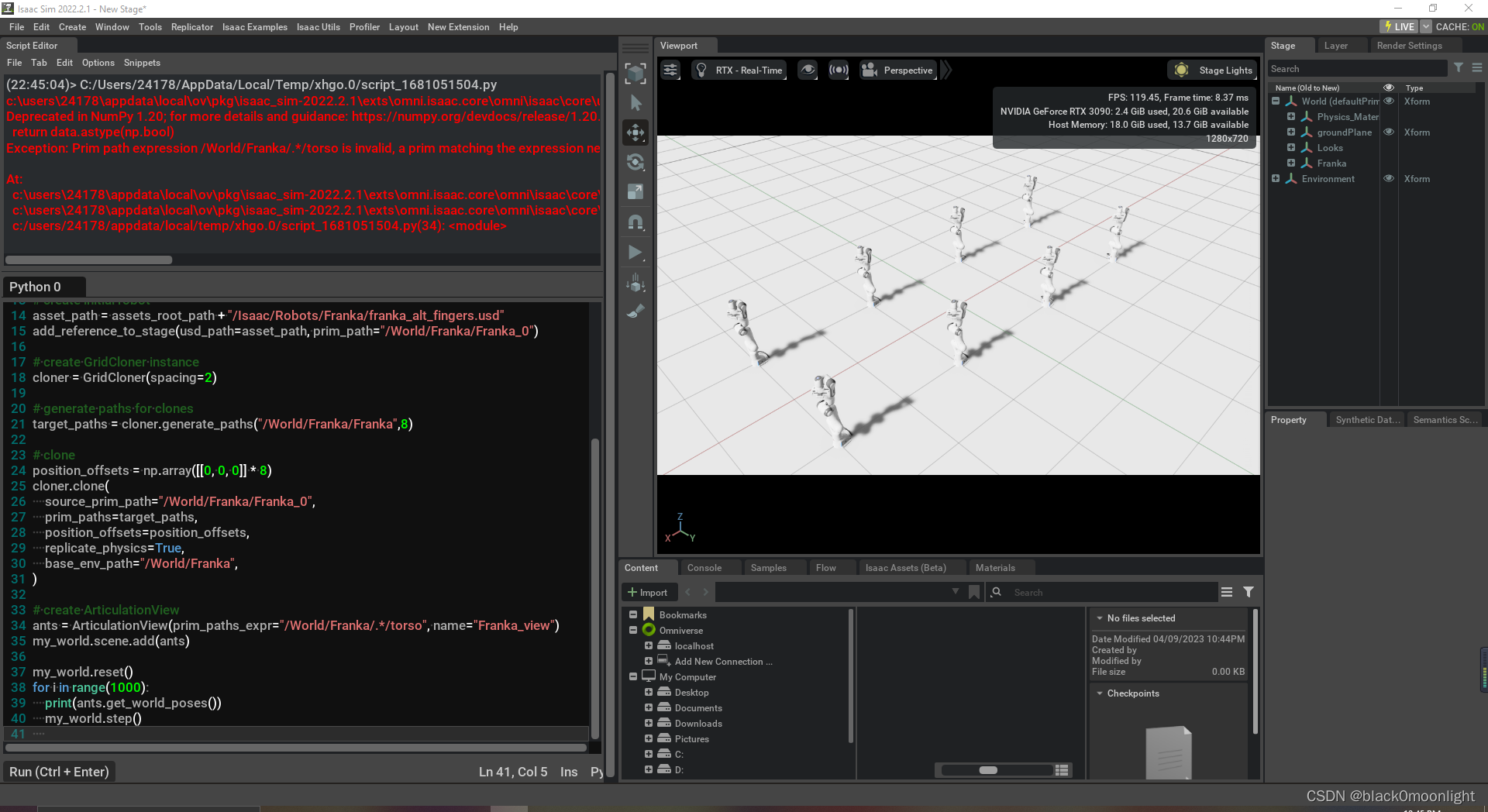
其中prim_paths_expr="/World/Franka/.*/torso"的错误暂时没管,不清楚影响。
2. 控制单个Franka机械臂
Dynamic Control — Omniverse Robotics documentation
2.1 位置控制
导入和控制指令在Sim中运行时,Script中的指令会被Franka的初始化覆盖,所以在这里使用另一种调试。
(1)将Python Script模式修改 Option->Clear after excute,代码在运行后会自动清除。
(2)输入并运行代码,导入Franka机器人。
from omni.isaac.core import World
from omni.isaac.core.robots import Robot
from omni.isaac.core.utils.stage import add_reference_to_stage
from omni.isaac.core.utils.nucleus import get_assets_root_pathmy_world = World(stage_units_in_meters=1.0)
my_world.scene.add_default_ground_plane()assets_root_path = get_assets_root_path()
asset_path = assets_root_path + "/Isaac/Robots/Franka/franka_alt_fingers.usd"
add_reference_to_stage(usd_path=asset_path, prim_path="/World/Franka_1")articulated_system_1 = my_world.scene.add(Robot(prim_path="/World/Franka_1", name="my_franka_1"))(3) 启动仿真
(4)输入并运行控制代码
from omni.isaac.dynamic_control import _dynamic_control
import numpy as np
dc = _dynamic_control.acquire_dynamic_control_interface()
articulation = dc.get_articulation("/World/Franka_1")dc.wake_up_articulation(articulation)
joint_angles = [np.random.rand(9) * 2 - 1]
dc.set_articulation_dof_position_targets(articulation, joint_angles)运行结果:

2.2 单自由度位置控制
接下来的控制调试都可以在(2)导入Franka机器人 的基础上继续。
from omni.isaac.dynamic_control import _dynamic_control
import numpy as np
dc = _dynamic_control.acquire_dynamic_control_interface()
articulation = dc.get_articulation("/World/Franka_1")
dc.wake_up_articulation(articulation)
dof_ptr = dc.find_articulation_dof(articulation, "panda_joint2")
dc.set_dof_position_target(dof_ptr, -1.5)2.2 速度控制
from pxr import UsdPhysics
stage = omni.usd.get_context().get_stage()
for prim in stage.TraverseAll():prim_type = prim.GetTypeName()if prim_type in ["PhysicsRevoluteJoint" , "PhysicsPrismaticJoint"]:if prim_type == "PhysicsRevoluteJoint":drive = UsdPhysics.DriveAPI.Get(prim, "angular")else:drive = UsdPhysics.DriveAPI.Get(prim, "linear")drive.GetStiffnessAttr().Set(0)
from omni.isaac.dynamic_control import _dynamic_control
import numpy as np
dc = _dynamic_control.acquire_dynamic_control_interface()
#Note: getting the articulation has to happen after changing the drive stiffness
articulation = dc.get_articulation("/World/Franka_1")
dc.wake_up_articulation(articulation)
joint_vels = [-np.random.rand(9)*10]
dc.set_articulation_dof_velocity_targets(articulation, joint_vels)2.3 单自由度速度控制
from pxr import UsdPhysics
stage = omni.usd.get_context().get_stage()
panda_joint2_drive = UsdPhysics.DriveAPI.Get(stage.GetPrimAtPath("/Franka/panda_link1/panda_joint2"), "angular")
panda_joint2_drive.GetStiffnessAttr().Set(0)
from omni.isaac.dynamic_control import _dynamic_control
import numpy as np
dc = _dynamic_control.acquire_dynamic_control_interface()
#Note: getting the articulation has to happen after changing the drive stiffness
articulation = dc.get_articulation("/World/Franka_1")
dc.wake_up_articulation(articulation)
dof_ptr = dc.find_articulation_dof(articulation, "panda_joint2")
dc.set_dof_velocity_target(dof_ptr, 0.2)2.4 力矩控制
from omni.isaac.dynamic_control import _dynamic_control
import numpy as np
dc = _dynamic_control.acquire_dynamic_control_interface()
articulation = dc.get_articulation("/World/Franka_1")
dc.wake_up_articulation(articulation)
joint_efforts = [-np.random.rand(9) * 1000]
dc.set_articulation_dof_efforts(articulation, joint_efforts)3. 信息获取
3.1 获取单个Franka状态
from omni.isaac.dynamic_control import _dynamic_control
dc = _dynamic_control.acquire_dynamic_control_interface()art = dc.get_articulation("/World/Franka_1")# Get information about the structure of the articulation
num_joints = dc.get_articulation_joint_count(art)
num_dofs = dc.get_articulation_dof_count(art)
num_bodies = dc.get_articulation_body_count(art)
print(num_joints)
print(num_dofs)
print(num_bodies)# Print the state of each degree of freedom in the articulation
dof_states = dc.get_articulation_dof_states(art, _dynamic_control.STATE_ALL)
print(dof_states)# print position for the degree of freedom
print(dof_state.pos)# Get state for a specific degree of freedom
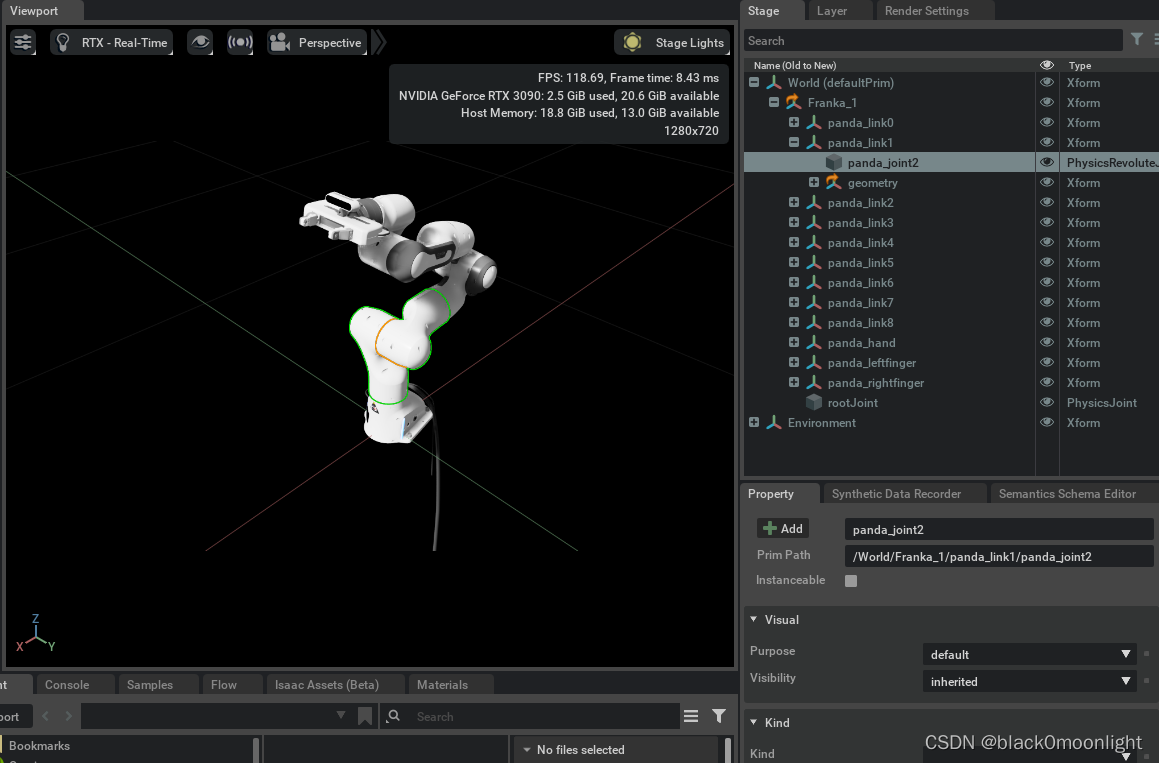
dof_ptr = dc.find_articulation_dof(art, "panda_joint2")
dof_state = dc.get_dof_state(dof_ptr, _dynamic_control.STATE_ALL)
print(dof_state)
print(dof_ptr)
其中,可以在Stage中查看到panda_joint2的具体位置。
3.2 获取物体状态
在这里,可以直接创建一个Cube对象,放置在World中。
我直接调用了自己的环境。
Core [omni.isaac.core] — isaac_sim 2022.2.1-beta.29 documentation
from omni.isaac.core import World
world = World()world = World(stage_units_in_meters=1.0)
world.scene.add_default_ground_plane()from omni.isaac.core.objects import DynamicCuboid
import numpy as npCube = world.scene.add(DynamicCuboid(prim_path = "/World/Cube",name = "my_cube",position = np.array([0,0,1]),scale = np.array([1,1,1]),color = np.array([1,1,1])))world.reset()position, oritentation = Cube.get_world_pose()
linear_velocity = Cube.get_linear_velocity()
angular_velocity = Cube.get_angular_velocity()print("Position is:", position)
print("Orientation is:", oritentation)
print("Linear velocity is:", linear_velocity)
print("Angular velocity is:", angular_velocity)
标签:
相关文章
-
无相关信息