Cartographer调参与系统资源使用情况分析
任务动机:通过Cartographer调参,达到在Rockchip rk3399开发板上实时和精度兼顾的效果。
任务描述:参照Cartographer官方调参文档,通过逐个调参,记录真实机器人建立的地图和系统资源消耗。
1. 硬件及OS信息
使用预先录制好的bag,然后用同一个bag对比不同的参数效果
2. 参数效果
评判调参效果,从两方面进行:
- 建图中的优化实时性,即在建图中纠偏优化的实时速度;
- 建图完成后的优化速度或者优化时间。
建图完成以后,地图的保存分成三步,写成一个脚本文件,这里并没有用通用变量,用起来需要进入脚本修改名称。使用cartographer_ros/offline_node 进行参数粗调,找到建图质量较好的地图后,记录实时的CPU使用情况。
2.1 官方给出的调参教程
### Low latency 调整
#### local
- 提高 voxel_filter_size
- 提高 submaps.resolution
- 降低 min_num_points max_range 提高 max_length
- 降低 max_range
- 降低 submap.num_range_data#### global
- 降低 optimize_every_n_nodes
- 提高 num_background_threads <= CPU 核数
- 降低 linear_xy_search_window linear_z_search_window angular_search_window
- 提高global_constraint_search_after_n_seconds
- 降低max_num_iterations2.2 参数调整
第一个调整的参数推荐 MAP_BUILDER.num_background_threads 先明确预留的CPU资源,在这个基础上进行调整。
2.2.1 Local SLAM(optimize_every_n_nodes = 0)
a.submap.num_range_data
构建子图需要的scan数据量
过程效果 = 1
最终效果 = 4
CPU使用情况
过程中
优化后
CPU
过程中
优化后
过程中
优化后
CPU
过程中
优化后
CPU
优化后
过程中
优化后
Result:
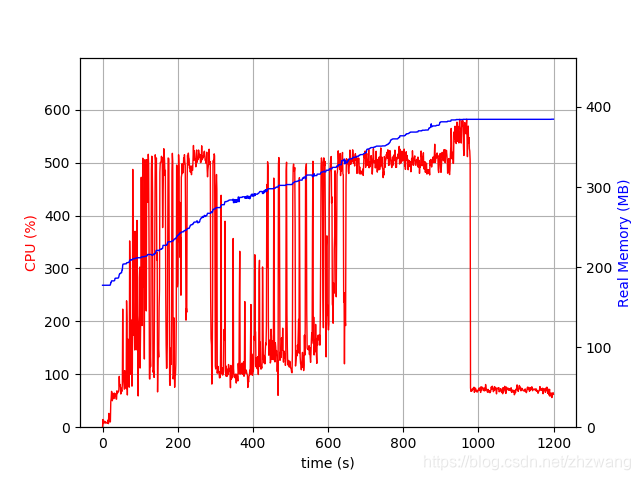
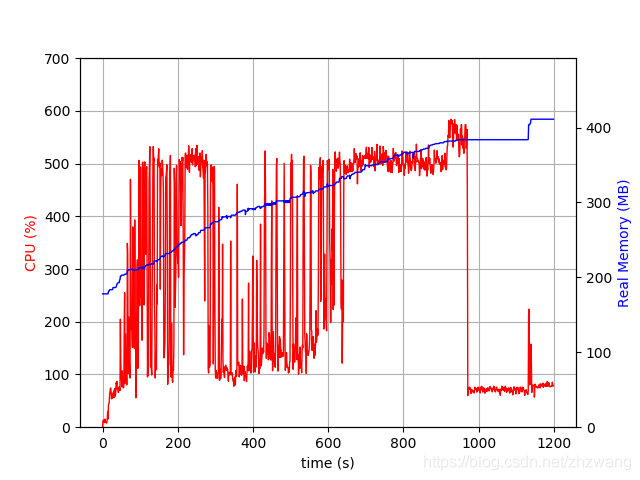
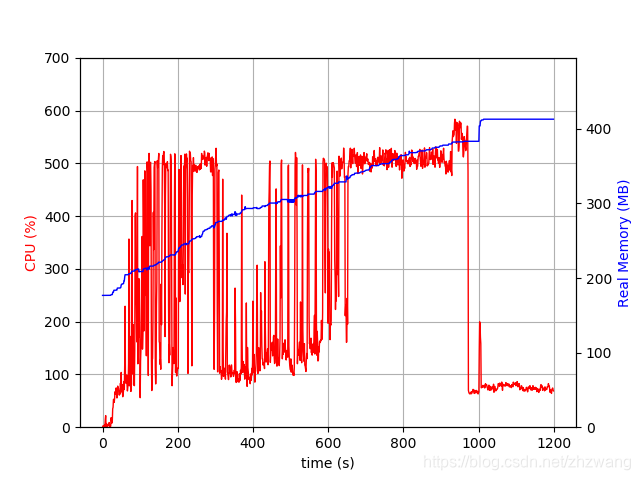
可以看出,num_range_data设置的值与CPU有这样一种关系,值小(10),CPU使用率比较稳定,整体偏高,值大时,CPU短暂爆发使用(插入子图的时候),平时使用率低,呈现极大的波动状态。
num_range_data表示多少个scan来构成submap,这个值的设定需要根据laser和运动速度进行具体的调整。
b. real_time_correlative_scan_matcher.rotation_delta_cost_weiht
finish_trajectory 后,及完成优化效果均相同
CPU
original
finish_trajectory and optimized
CPU
original
finish_trajectory & optimized
CPU
original
finish_trajectory & optimized
original

optimized
CPU
original
finish_trajectory & unoptimized
CPU
Results:
从CPU使用率来看,该参数并不会产生明显的影响,主要影响的是过程中的效果,间接会影响最后的优化时间长
2.2.2 Global SLAM
调整scan_matcher中的求解方法
a. bool use_online_correlative_scan_matching
选择是否先求解online scan matching,然后用correlative scan matcher为Ceres求解器产生一个好的初始解
最终优化效果于使用初值相同。
b. Ceres.POSE_GRAPH.constraint_builder.fast_correlative_scan_matcher.branch_and_bound_depth
branch and bound是优化器中fast_correlative_matcher搜索方法,界定分支法,求解问题构成一个搜索树,depth是构造树的深度。
过程中
优化后
优化完成后
过程1 优化完成后
过程1 优化完成后
这里走了一个大坑,在从机使用bag play,省掉了一个ssh到主机的过程,结果网络延迟造成了结果不稳定。
c. real_time_correlative_scan_matcher.real_time_correlative_scan_matcher.linear_search_window
线距离搜索框,在这个框的大小内,搜索最佳scan匹配.
减小该参数可以增强实时的建图效果,降低闭环优化的效果,形成闭环时,产生的重影较多
d. real_time_correlative_scan_matcher.real_time_correlative_scan_matcher.angular_search_window
同上,角度搜索框的大小
过程中出现
过程中
过程中2
优化后
d.real_time_correlative_scan_matcher( translation_delta_cost_weight)/(rotation_delta_cost_weight)
这两个参数相当于最小化误差函数中的权重值,两者的比值,决定了更侧重与平移和旋转中的哪部分
这个值大小的设定,可以参照local latency rotation_delta_cost_weight的修改
3. 其他相似参数
4. 参考
1.https://google-cartographer-ros.readthedocs.io/en/latest/tuning.html
2.https://google-cartographer-ros.readthedocs.io/en/latest/algo_walkthrough.html
3.https://google-cartographer.readthedocs.io/en/latest/configuration.html
标签:
相关文章
-
无相关信息