严老师matlab工具箱仿真-无人车定位
程序开发
2023-09-06 11:55:24
严老师matlab工具箱仿真-无人车定位
1. trj仿真测试
所用的轨迹仿真工具,为基于matlab的二次开发的开源工具包,默认模式为飞行器运动仿真.通过自定义运动模式和参数,生成相应的机载imu数据和姿态、速度、位置等.
1.1. 自定义运动模式
运动模式的定义是根据时间进行分段的,加入要模拟一段首钢园区的轨迹路线,按照园区的路线分布,自定义下面一段运动轨迹,从编号1到23段,时间分段的运动定义详细见下表:
注:复合左右转中,当飞机在做方位转弯的时候,需要先进行滚转一定角度,在进行转弯后在滚转回来.
% 对应的不同的方位转弯速度,需要滚转不同的角度,具体的计算方式 见捷联惯导算法与组合导航原理 -7.1.5
1.2. 仿真数据生成
1.2.1. 生成的imu数据,姿态,速度,位置.
设定数据采样间隔时间为0.01
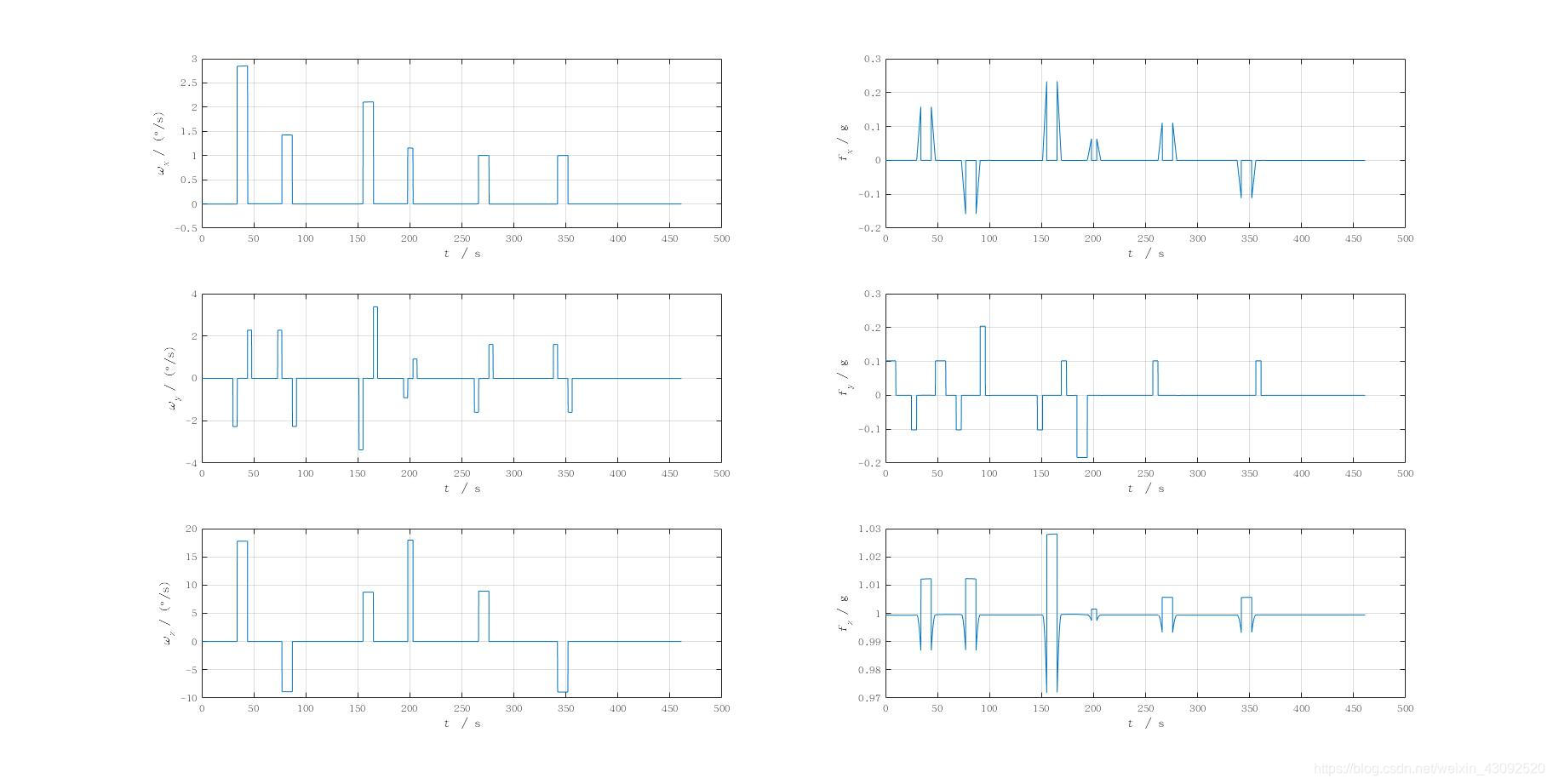
1.2.2. 噪声设定
(0.03, 100, 0.001, 5)
%分别为 imuerr.eb为陀螺仪零偏稳定性,imuerr.db为加速度计零偏稳定性,imuerr.web为角速度随机游走,imuerr.wdb为加速度随机游走
% eb - gyro constant bias (deg/h)
% db - acc constant bias (ug)
% web - angular random walk (deg/sqrt(h))
% wdb - velocity random walk (ug/sqrt(Hz))
imu = K*imu + drift error.drift = [ ts*imuerr.eb(1) + sts*imuerr.web(1)*randn(m,1), ...ts*imuerr.eb(2) + sts*imuerr.web(2)*randn(m,1), ...ts*imuerr.eb(3) + sts*imuerr.web(3)*randn(m,1), ...ts*imuerr.db(1) + sts*imuerr.wdb(1)*randn(m,1), ...ts*imuerr.db(2) + sts*imuerr.wdb(2)*randn(m,1), ...ts*imuerr.db(3) + sts*imuerr.wdb(3)*randn(m,1) ];
% GPS噪声设定 标准差为1mposGPS = trj.pos + randn(3,1);
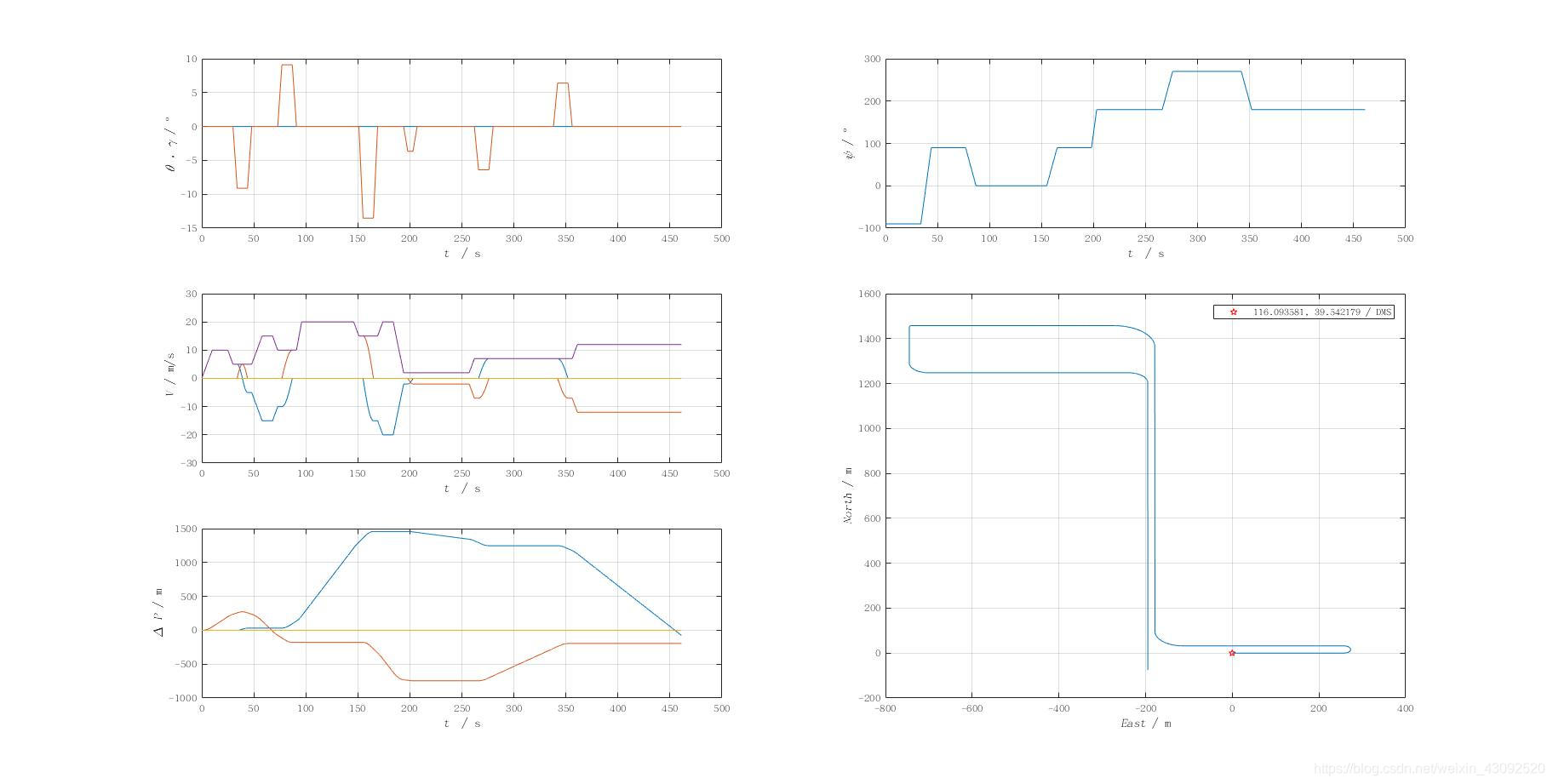
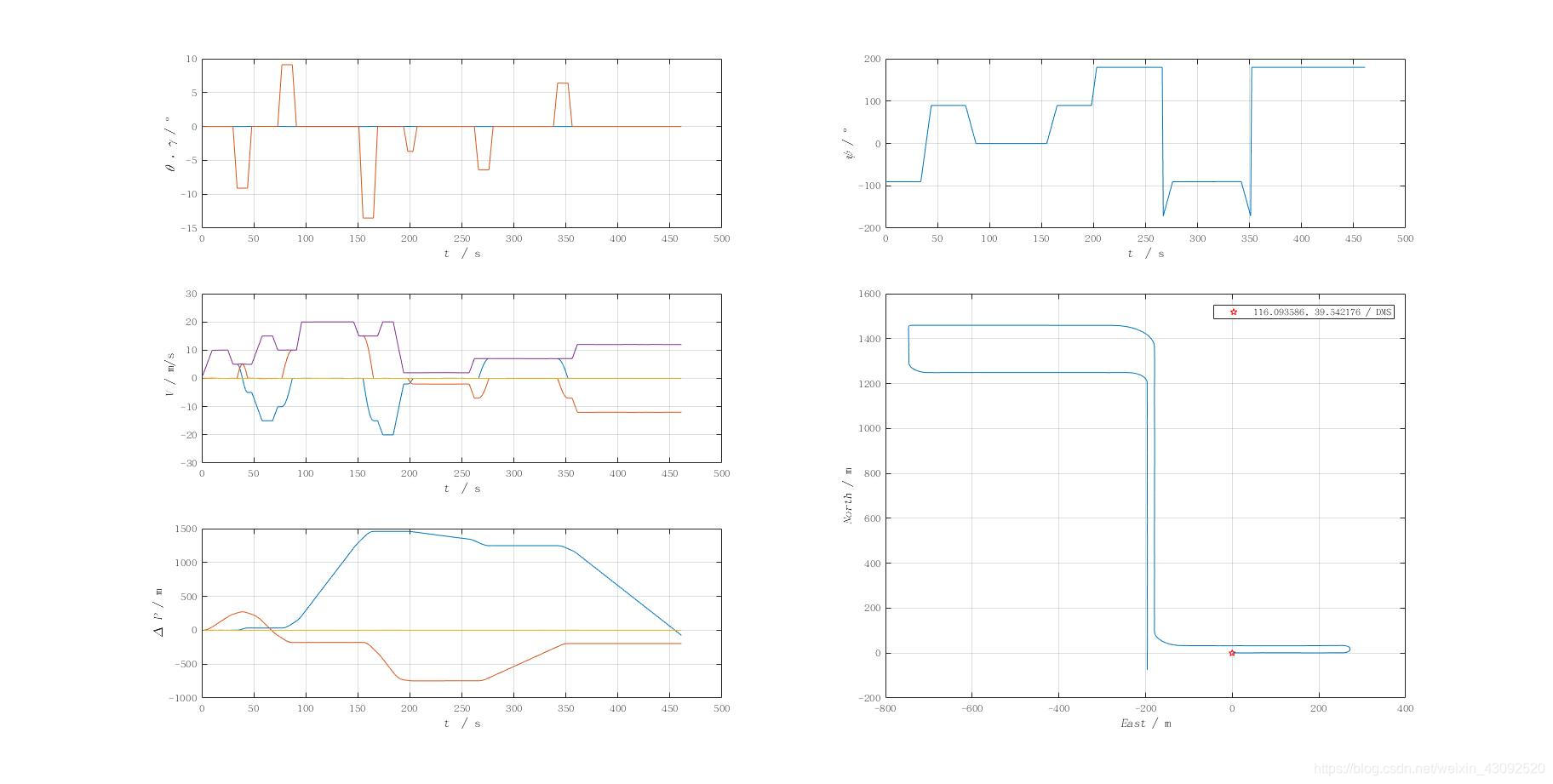
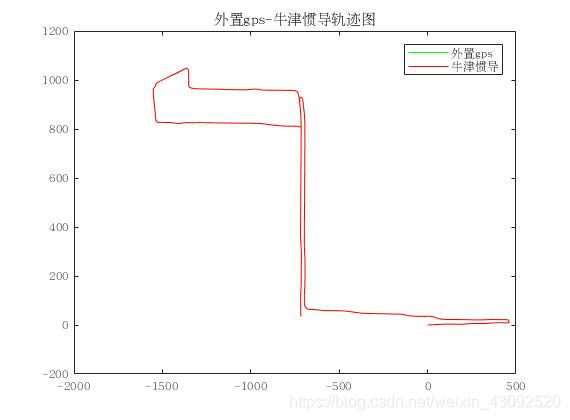
1.3. 定位算法仿真结果
讲上述生成的仿真原始数据,加上漂移和噪声后,输入定位算法进行测试:
roll,pitch,yaw姿态&Vn速度&位置&轨迹
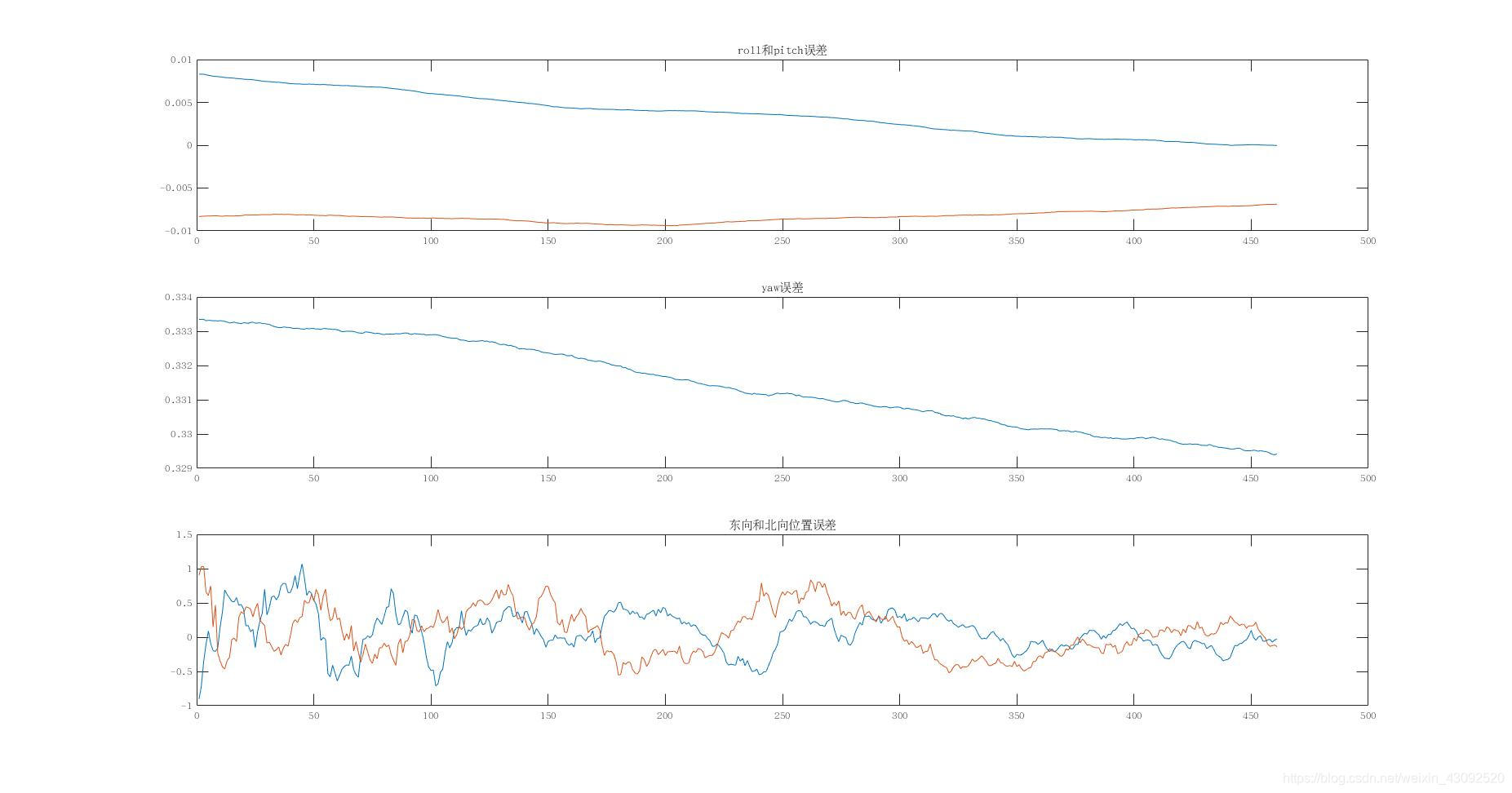
**姿态&位置误差 **
标签:
上一篇:
开发工业ERP系统要考虑哪些模块?要准备怎样的数据?
下一篇:
相关文章
-
无相关信息