TI mmWave radar sensors Tutorial 笔记 | Module 3: Velocity Estimation
本系列为TI(Texas Instruments) mmWave radar sensors 系列视频公开课 的学习笔记。
内容在CSDN和微信公众号同步更新

FMCW Radars – Module 1 : Range Estimation
FMCW Radars – Module 2 : The Phase of the IF Signal
FMCW Radars – Module 3 : Velocity Estimation
FMCW Radars – Module 4 : Some System Design Topics
FMCW Radars – Module 5 : Angle Estimation
Module 3 Velocity Estimation
This module : to answer the following questions



FFT’s on a complex sequence
Note: 下图中的 ω 1 = ω omega_1 = omega ω1=ω


Question: How far apart the two frequencies ω 1 omega_1 ω1 and ω 2 omega_2 ω2 have to be for them to show up as separate peaks in the FT?


结论: Longer the sequence length ⇒ Rightarrow ⇒ better resolution
总结: 离散信号 VS 连续信号 频率分辨率
How to measure the velocity (v) of an object using 2 chirps
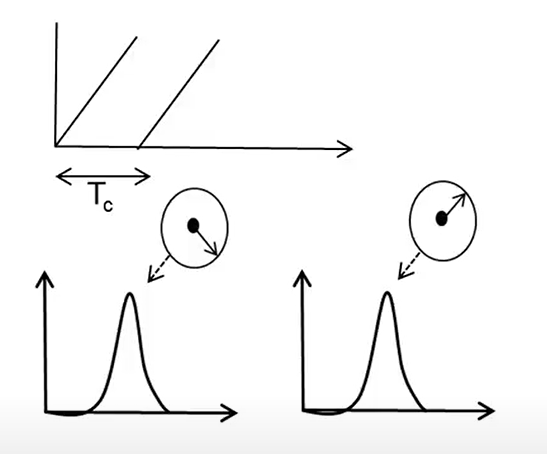
结论: The phase difference measured across two consecutive chirps can be used to estimate the velocity of the object
Maximum measurable velocity

结论 : The maximum relative speed ( v m a x v_{max} vmax) that can be measured by 2 chirps spaced T c T_c Tc apart is:
Measuring velocity with multiple objects at the same range
目前,已经知道了如何测量 the velocity of a single object
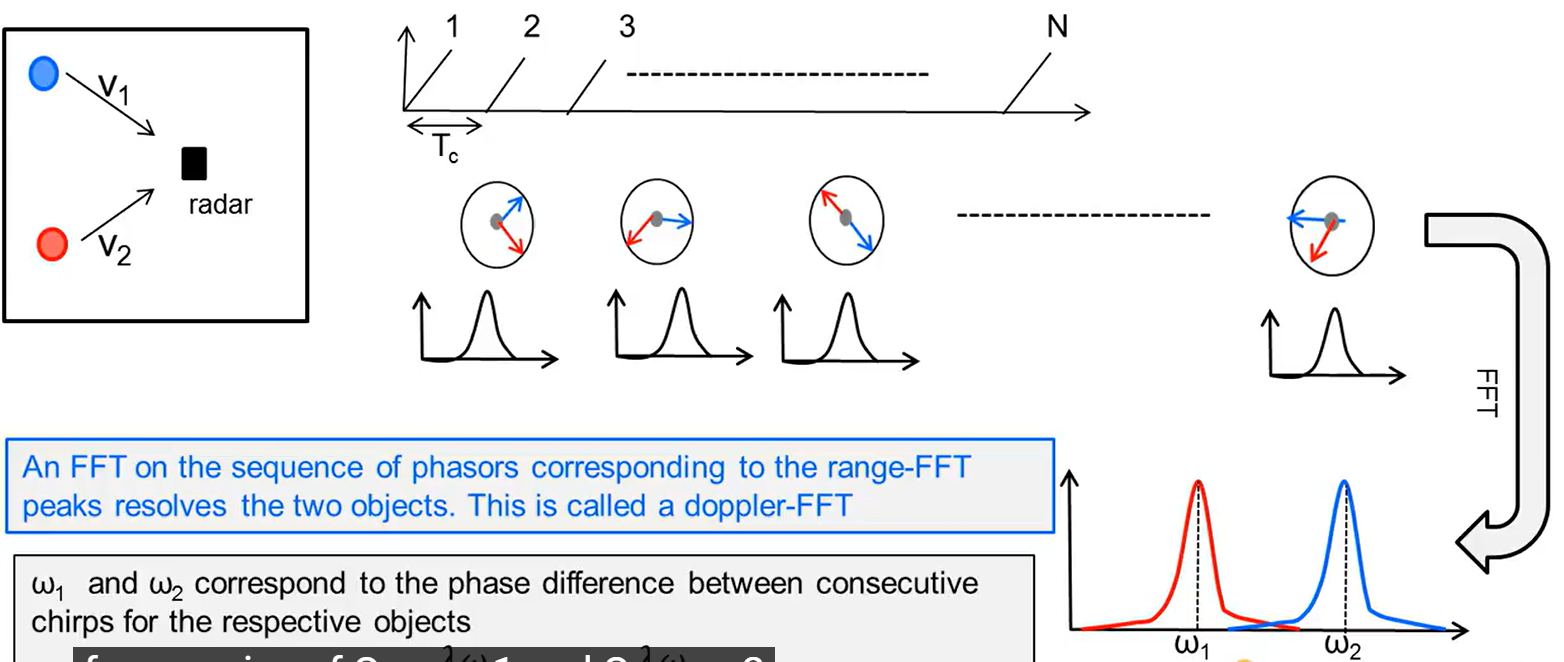
结论 : ω 1 omega_1 ω1 and ω 2 omega_2 ω2 correspond to the phase difference between consecutive chirps for the respectively objects
Velocity resolution
注意: 这里的 N: number of chirps in one frame !
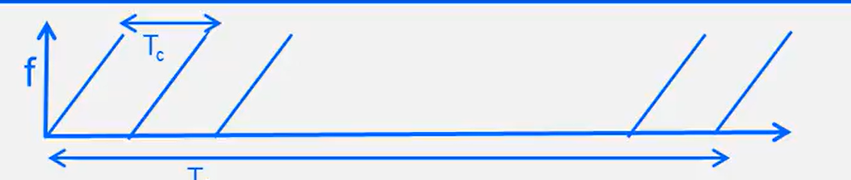
Question: 比较下述两个雷达的maximum measurable velocity ( v m a x v_{max} vmax) 和 velocity resolution ( v r e s v_{res} vres)
Next module:
标签:
相关文章
-
无相关信息