多传感器融合 | 一文梳理Allan方差的相关概念
作者 | Zeal 编辑 | 自动驾驶与AI
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【多传感器融合】技术交流群
后台回复【多传感器标定】获取Lidar/Camera/Radar/IMU等传感器在线离线标定论文!
作者|Zeal
编辑|自动驾驶与AI
前言
原本以为Allan方差应该是一个简单的方差计算方法,但是经过两天的各种探索和资料学习,发现这玩意的原理远比想象中的复杂。详细的公式推导需要设计到随机信号的频谱分析、IMU各种误差模型等内容。并且,Allan方差一开始用来分析原子钟晶体振荡频率的误差分析,后续这种分析方法被用到IMU的误差分析,并且IEEE也制订了相应标准(见参考资料1),这一系列的发展过程其实很长,同时也有不同的定义。以上种种,让读者放弃了摸清Allan方差的详细来龙去脉和公式推导,毕竟,工程师和数学家还是有区别的……但是关于Allan方差的解释和应用网上的博文也都不够全面,单看某一篇文章很难获取对Allan方差的直观理解(没有找到一篇很好的文章能够说明Allan方差的定义和双对数曲线不同斜率段对应的噪声项是怎么来的)。
本文对以下内容做了梳理:
IMU的噪声项及其含义
Allan方差的定义和推导
对陀螺仪的数据计算Allan方差的方法
Allan方差双对数曲线的含义和分析
关键概念解读
PS: 笔者水平有限,本文只是笔者对Allan方差学习的总结,并不是一篇严格的理论推导文章
惯性测量单元(IMU)误差项
这部分可以参考参考资料2
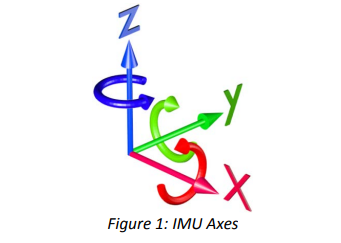 IMU模型
IMU模型 IMU的输出可以看上图,典型的六轴IMU输出三个轴的加速度和三个轴的角速度。对加速度做积分可以得到速度、再做一次积分可以得到位移;对角速度积分可以得到角度。
电子器件输出都会有误差,又叫噪声。IMU的噪声项主要有以下几种:

IMU误差示意图
零偏(Bias),单位
deg/hr,m/s^2零偏这个词似乎不太准确,因为在非零输出时也会有偏差。如果把IMU的输出当作一个遵循高斯分布的随机信号,在静止时该随机信号的均值应该是零,但是由于bias,该均值并不是0。见上面的IMU误差示意图可以较好地理解。要注意的是零偏是会随着时间改变的,因此在很多卡尔曼滤波模型中会把Bias当作一个状态量。零偏可重复性(Bias Repeatability),单位
deg/hr,m/s^2每次上电零偏的稳定程度。零偏稳定性(Bias Stability),单位
deg/hr/hr,m/s^2/hr有时也叫零偏不稳定性(Bias Instability)。描述零偏的稳定程度,也可以理解为零偏的噪声。(有些文章也会叫做零偏的角度随机游走)。比例因子(Scale Factor) 比如比例因子是1.2,那么当真值是10m/s^2的时候,IMU的输出可能是12m/s^2。
角度随机游走(ARW:Angle Random Walk),单位:,这是一个比较难理解的量,实际上笔者也没法完全理解。简单理解就是当信号叠加上一个白噪声之后,对该信号的积分就包含了白噪声的积分,白噪声的积分不再是一个白噪声,而是一个马尔科夫模型,也就是此时的噪声是上一时刻的噪声加上一个白噪声。那么放在这里,对于陀螺仪的输出(角速度)一般是用来做积分得到角度,那么角速度的白噪声的积分就会得到角度的偏差,因此叫做角度随机游走。有时候角度随机游走的值又叫做白噪声强度,比如在kalibr:IMU-Noise-Model中就有这样的描述:
White Noise Terms: The parameters for the "white noise" processes are often specified in the datasheet of the sensor manufacturer. A bit misleading, they are commonly denoted as angular random walk in case of the gyro, and velocity random walk for the accel
速率随机游走(RRW:Rate Random Walk) 与角度随机游走类似,速率随机游走可以看作是角加速度的误差积分导致的角速度的误差。速率随机游走对应的是陀螺仪在长时间下才会发生改变的误差项,因此可以用来近似当作
Bias使用。在kalibr:IMU-Noise-Model中使用速率随机游走系数当作零偏参数。
角度随机游走(ARW:Angle Random Walk)v.s. 角速率随机游走(ARRW)
这个很容易弄混淆的一个概念。对应到加速度计上应该叫速度随机游走和加速度随机游走。因为讲解Allan方差的时候一般会以陀螺仪为示例,因此在文中可能只出现角度随机游走和角速率随机游走。角速率随机游走又会被简写成速率随机游走,比如参考资料1的IEEE标准。下面这段百度百科的描述反而清晰:
角速率传感器的性能参数中包含角度随机游走(ARW)和角速率随机游走(ARRW),前者反映了角速率信号中白噪声的特性,积分后表现为角度随机游走;后者为角速率本身的随机游走,可认为是角加速度白噪声的积分结果。
Allan方差
Allan方差又叫阿伦方差,可以用Allan方差用来描述物理器件的不同噪声参数。Allan方差相比于普通的方差具有更好的描述长时间误差的优势(具体也不太清楚)。Allan方差现在好像基本被用来当作IMU噪声标定的标准方法了。
数据方差
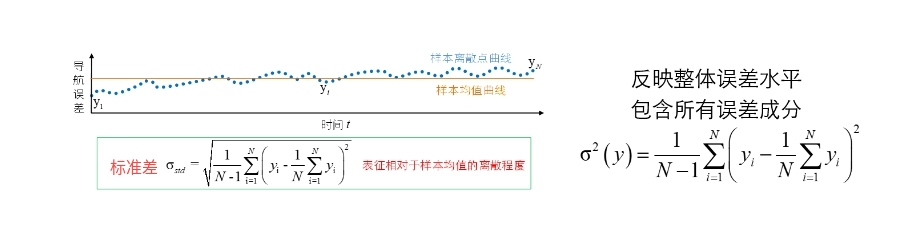
(上图引用自新手入门系列3——Allan方差分析方法的直观理解)
系数使得这样计算出来的方差是数据方差的无偏估计(概率统计原理)。
对不同时间尺度上的误差刻画
上面的数据方差计算方法对数据的整个序列计算误差水平,无法细分出不同时间尺度上的误差波动情况。为了能够刻画不同时间周期下数据的波动情况,我们可以先对数据分块,对每块数据取平均作为该块数据的代表。假设原始数据的采样时间是,每3个数据分成一块,则每块的间隔时间。分块之后,我们再将个数据块计算方差,最后求这个方差的数学期望,作为我们最后的方差
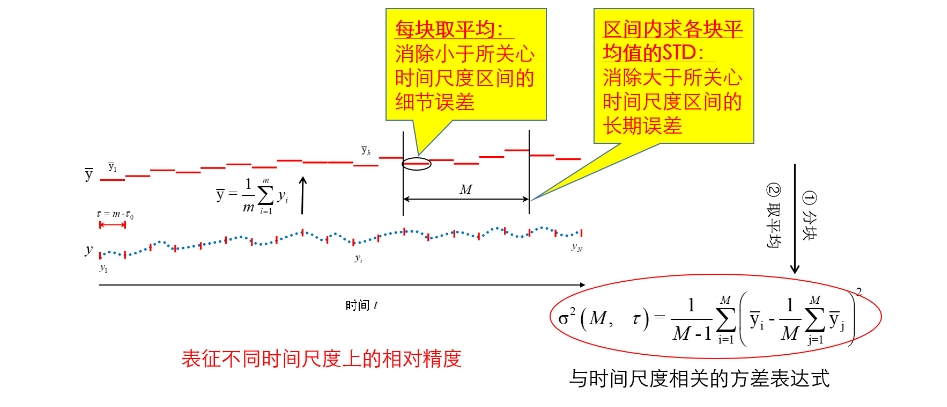

上式中表示求统计平均(期望)
Allan方差定义
Allan方差是上述通用样本方差分析在时的一个特例,也就是在公式(1)中令
注意,Allan方差是的函数
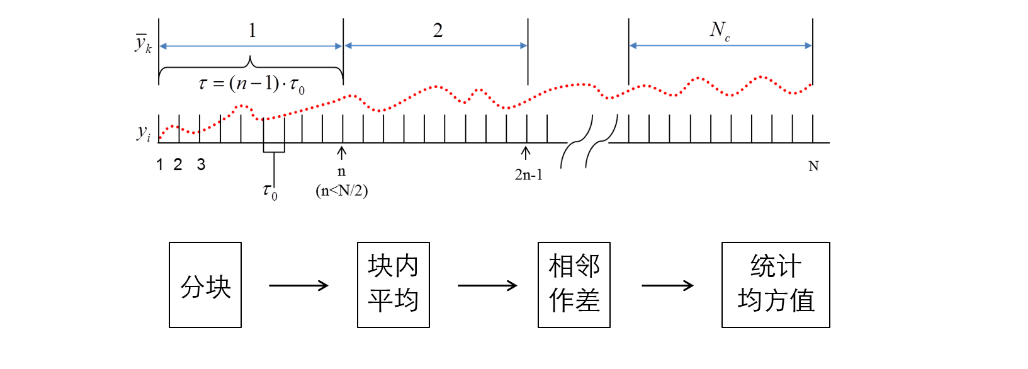
角速度的Allan方差计算
这里只推导一种方式,根据IEEE Standard
令陀螺仪的角度输出为,则角度为
对于离散时间形式,时间点。其中是陀螺仪的输出时间间隔,为总体样本数量。则,在时间段到之间,角速度的平均值是:
其中
将公式(3)带入上文Allan方差的定义公式(2)中可以得到:

将公式(4)的期望代替为在整个数据样本(数量为N)上求平均,可以得到如下形式

重叠分段法计算Allan方差
这部分主要参考:Allan Variance: Noise Analysis for Gyroscopes在公式(5)中,对每个原始数据作为一段。切割方式有很多种,在图Allan方差定义中,每段数据都不重叠。另一种分割方法是让每段数据都重叠,如下图所示
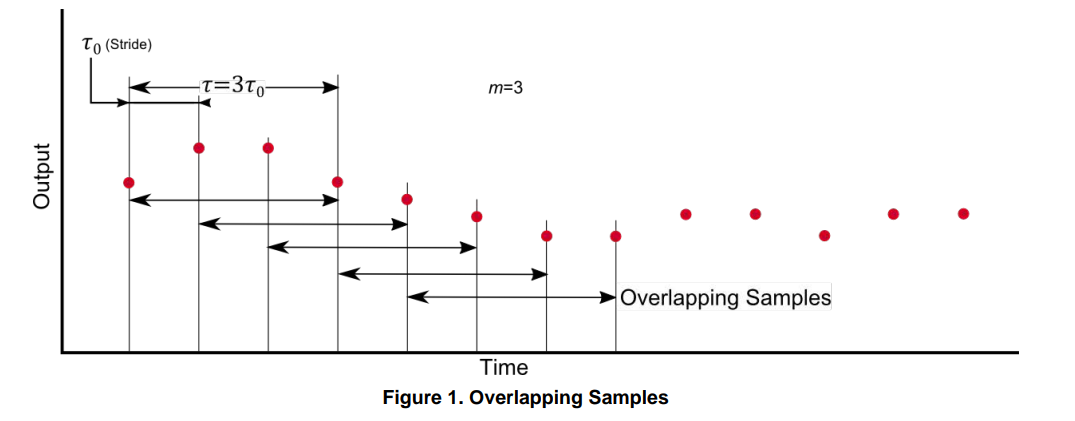
上图中,也就是每4个原始数据作为一组,组与组之前相差长度。
Allan方差的计算方式与公式(5)保持一致。
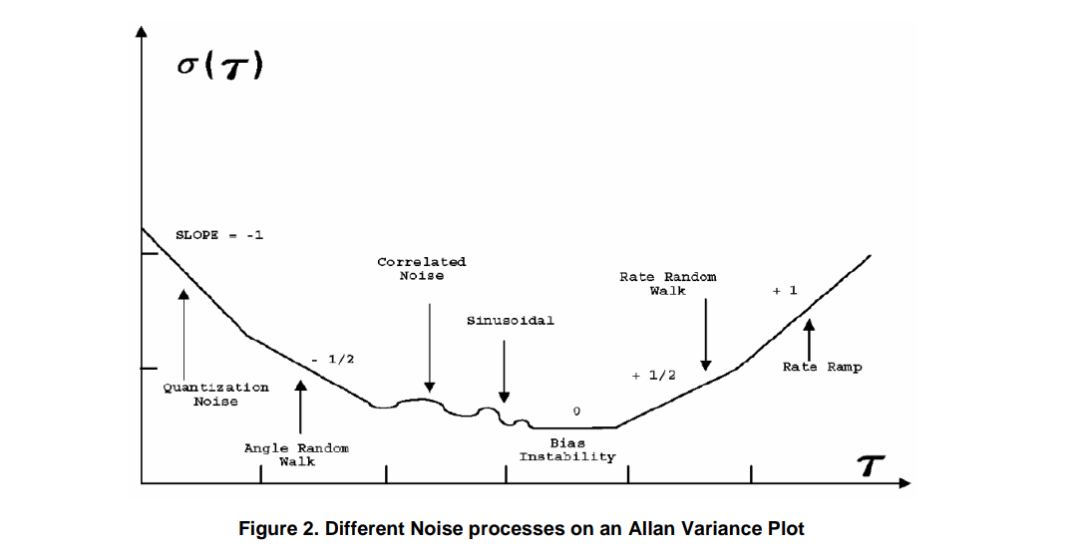
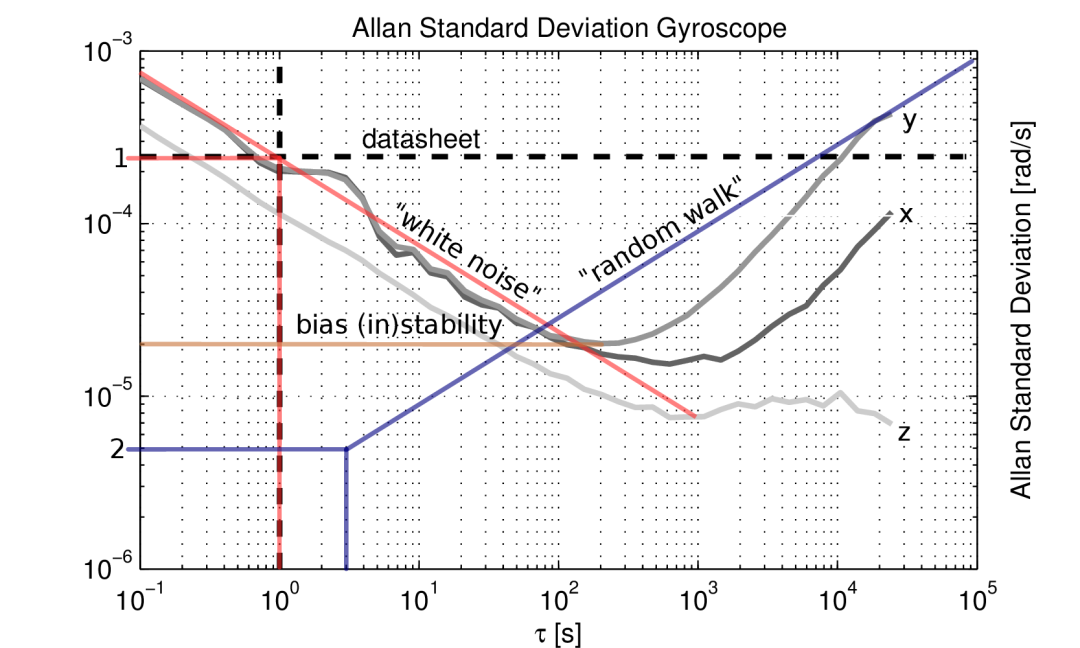
Allan方差双对数曲线
根据公式(5),Allan方差是时间周期的函数,我们根据不同的,计算出对应的Allan方差,并将作为x,作为y,画出曲线,如下图:
注意,y轴是Allan方差的开根,又叫Allan
Allan方差双对数曲线可以用不同斜率的直线拟合,不同斜率部分的直线代表不同的含义。
这里讲述一下如何从双对数曲线分析信号的不同误差成分(以陀螺仪为例)
角度随机游走/白噪声强度
角度随机游走对应到双对数曲线中斜率为的直线,取值可以直接读取处的值。
零偏不稳定性
零偏不稳定性对应双对数曲线中斜率为0的直线,也就是双对数曲线中最小值位置。
速率随机游走
速率随机游走对应双对数曲线中斜率为的直线,取值时取该直线与的交点。
上面三个误差项是我们用得比较多的误差项,画成图如下:
为什么不同的斜率对应不同的误差项??
说实话,笔者对这个部分也是一知半解,说实话,也没有必要完全弄明白,里面涉及到时域信号分析太多基础知识了。这里根据IEEE Standard里一些内容根据自己的理解简单讲述一下。噪声的双边功率谱密度(PSD:Power Sepctral Density)与Allan方差有如下关系:

上式中可以看作Allan方差是噪声能量经过一个为转移函数的滤波器,这个函数是由Allan方差计算决定的。这个滤波器的带宽跟有关,因此,不同的对应的Allan方差来分析噪声的不同频段特性。
以白噪声为例,其功率谱密度为

将其带入功率谱密度与Allan方差关系的公式中,并进行公式中的积分,可以得到如下结果:

对上式 开根后求对数后可以得到
刚好可以得到一条斜率为的直线,且当的时候可以得到。这也对应了上文中从Allan方差双对数曲线中求角度随机游走的方式。
应用重点
不同的IMU建模方式需要不同的系数
强调这一点是因为imu_utils工具标定的输出结果和kalibr的模型要求是不一样的。
在GTSAM中
在GTSAM中使用IMUFactor时需要IMU的几个参数:
IMU零偏Bias的初始值。但是这个参数可以先设置为0,后续逐步更新。(Bias是IMUFactor中的一个变量,会随时间改变)。
IMU加速度(3轴)和陀螺仪(3轴)的噪声参数。
IMU加速度(3轴)和陀螺仪(3轴)的Bias噪声参数。
上面2、3两点的参数可以使用imu_utils的标定结果。
其中第2点对应的是Allan方差双对数曲线(后文详细讲解)中斜率为-1/2的直线与 的交点(IEEE标准)。(可以直接取双对数曲线 处的值,因为"据说"惯性单元在1Hz的时候对应的噪声强度主要由白噪声强度左右。这段话出自kalibr:IMU-Noise-Model,imu_utils也是直接取这一点的值)
This is only true since the noise power in most inertial sensors is dominated by "white noise" at a frequency of approximately 1Hz.
第3点描述的是Bias的不稳定性,有些地方也叫Bias随机游走。这个参数对应的是Bias [In]Stability。Bias Stability可以直接从Allan方差双对数曲线中读出来(后文详解)
之所以GTSAM需要这些参数是因为GTSAM中对IMU的建模方法跟大部分算法相同,都是把IMU的Bias当作状态,认为Bias会随着时间变化而缓慢改变(这也是较为正确的做法)。因此需要标定出Bias的稳定性。
在[kalibr]中在[kalibr]中对IMU的建模是使用下面的公式:
其中代表真值,是Bias,是噪声。因此在[kalibr]中使用角度随机游走系数作为。同时使用角速率随机游走作为。一开始对这点很迷惑,为什么角速率随机游走可以用来作为。后面我在一个issue的回答中得到答案:issues63。[kalibr]对IMU的建模形式实际上是不够准确的,因为这里将当作一个恒定的量求解,实际上这是一个随着时间缓慢变化的量。而角速率随机游走则可以部分用力刻画这一偏差。事实上还是很难理解
单位
First, it is important to realize that Hertz (Hz) is defined as the inverse of seconds, which means that a noise density specification of X°/s/√Hz is exactly equivalent to an angle random walk specification of X°/√s with no conversion necessary. 出自:https://www.vectornav.com/resources/inertial-navigation-primer/specifications--and--error-budgets/specs-imuspecs
参考资料
【1】IEEE Standard Specification Format Guide and Test Procedure for Single-Axis Laser Gyros, AnnexC, IEEE Std 647-1995, 1995
【2】IMU Errors and Their Effects
【3】kalibr:IMU-Noise-Model
【4】imu_utils
【5】新手入门系列3——Allan方差分析方法的直观理解
【6】Allan Variance: Noise Analysis for Gyroscopes
(一)视频课程来了!
自动驾驶之心为大家汇集了毫米波雷达视觉融合、高精地图、BEV感知、传感器标定、传感器部署、自动驾驶协同感知、语义分割、自动驾驶仿真、L4感知、决策规划、轨迹预测等多个方向学习视频,欢迎大家自取(扫码进入学习)

(扫码学习最新视频)
视频官网:www.zdjszx.com
(二)国内首个自动驾驶学习社区
近1000人的交流社区,和20+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、Occpuancy、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

(三)【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向;

添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称
标签:
相关文章
-
无相关信息