hevc角度预测_3D-HEVC深度图帧内预测快速算法

发布时间: 2018-01-16
摘要点击次数:
全文下载次数:
DOI: 10.11834/jig.170176
2018 | Volume 23 | Number 1
图像处理和编码

3D-HEVC深度图帧内预测快速算法

王驰, 冯桂, 蔡春亭, 韩雪
华侨大学信息科学与工程学院, 厦门 361021
收稿日期: 2017-05-08; 修回日期: 2017-10-02
基金项目: 福建省自然科学基金项目(2016J01306);华侨大学研究生科研创新能力培育计划资助项目
第一作者简介:
王驰(1991-), 男, 华侨大学通信与信息系统专业硕士研究生, 主要研究方向为3D视频编码中的算法优化。E-mail:929854291@qq.com.
中图法分类号: TN919.81
文献标识码: A
文章编号: 1006-8961(2018)01-0018-10
摘要
目的
多视点纹理加深度视频(MVD)格式逐渐成为立体视频的主流表现形式之一。新一代高效率立体视频编码(3D-HEVC)继承了HEVC的编码结构并引入一些新的编码技术,导致深度图帧内编码过程具有较高的计算复杂度。针对这一问题,提出了一种深度图帧内编码快速算法。方法
本文算法利用深度图的特征分别对CU分割过程和粗略模式选择(RMD)过程进行优化。首先在四叉树编码结构上,利用基于纹理元的图像分析方法计算编码单元的梯度矩阵,若梯度矩阵中的梯度值之和小于给定的阈值,则终止该CU的分割进程。同时,对大尺寸的PU和小尺寸的PU分别利用纹理特征与粗略模式选择过程中Planar和DC进行低复杂度率失真计算后的最小率失真代价,跳过RMD中角度模式的检查过程。结果
实验结果表明,与原始算法相比,本文算法平均节省40.64%的深度图编码时间,而合成视点的平均比特率仅仅增加了0.17%。本文算法不仅能对平坦的CU跳过不必要的深度决策过程,而且有效地减少了RMD中需要遍历的模式数目,提高了编码器的效率。结论
该算法对CU分割进程和粗略模式选择过程都进行优化,在合成视点的视频质量几乎不变的前提下,有效降低了深度图的帧内编码复杂度。
关键词
3维高效率立体视频编码(3D-HEVC); 计算复杂度; 深度图; 帧内编码; 编码单元; 梯度矩阵
Fast intra prediction algorithm for depth maps in 3D-HEVC
Wang Chi, Feng Gui, Cai Chunting, Han Xue
Huaqiao University, Department of Information Science and Engineering, Xiamen 361021, China
Supported by: Natural Science Foundation of Fujian Province, China(2016J01306)
Abstract
Objective
The multi-view video plus depth (MVD) format is gradually becoming one of the main representations for 3D videos. The 3D high-efficiency video coding (3D-HEVC) is the latest coding standard for compressing the MVD format. The 3D-HEVC inherits the coding structure of HEVC. Consequently, the splitting process of coding units (CUs) and the intra mode search process in depth map intra coding have great computational complexity. New techniques for depth map intra coding, such as depth modeling mode and simplified depth coding, have been introduced in recent years to preserve the sharp edges of depth maps. These techniques play an important role in the coding of depth maps. However, the adoption of these techniques further increases the computational complexity in 3D-HEVC encoder. A fast algorithm for depth map intra coding is proposed in this study to reduce the computational complexity of depth map intra coding.
Method
There are a lot of large smooth regions which are separated by sharp edges in depth maps. The CU splitting process and the rough mode decision (RMD) process are improved by the proposed algorithm by using the unique characteristics of depth maps. An algorithm based on the concept of texture primitive is proposed for the hierarchical quad-tree coding structure to early terminate the CU splitting process. First, the gradient matrix of the current CU can be calculated by using the texture analysis algorithm based on texture primitive. On the basis of statistical analysis, a strong correlation between the optimal size and sum of gradient values in gradient matrix is considered for each CU. If the sum of gradient values in gradient matrix is small, then the optimal size of current CU will be large. By contrast, if the sum of gradient values in gradient matrix is large, then the optimal size of current CU will be small. Therefore, if the sum of gradient values in gradient matrix is smaller than a given threshold, then the CU splitting process should be terminated. For the RMD process, the texture features and the smallest $LCRD_{rm cost}$ of Planar and DC are used to skip the search of angular modes in RMD for prediction units (PUs) of large size and PUs of small size, respectively. Planar and DC are two intra prediction modes that are highly suited to code smooth PUs. If the texture of current PU is flat, then Planar or DC is likely to be selected as the optimal mode. Hence, for PUs of large size, if the sum of the gradient values in the gradient matrix is zero, then only Planar and DC are added to the full-RD search list, and the RMD process is skipped. When the size of PUs is small, if the smallest $LCRD_{rm cost}$ of Planar and DC is smaller than a given threshold, then the RMD process is terminated immediately and the search of angular modes in RMD is skipped.
Results
In the proposed approach, the unnecessary depth levels of smooth CUs can be skipped, and the number of intra mode candidates for RMD is effectively reduced. The reference software HTM 13.0 of the 3D-HEVC standard is used to verify the coding performance of the proposed algorithm. Eight JCT-3V specified test sequences with two resolutions of 1 024×768 and 1 920×1088 are tested. The quantization parameter (QP) values for texture are 25, 30, 35, and 40, and the QP values for depth maps are 34, 39, 42, and 45. Experimental results show that compared with HTM 13.0, the proposed algorithm achieves an average depth map coding time reduction of 40.64% with a small bitrate loss of 0.17% for synthesized views under all intra scenario. For the eight test sequences, the coding time reduction of depth maps ranges from 34.77% to 51.42%, which indicates that the proposed algorithm can effectively improve encoder efficiency and has a general validity. In particular, the time saving of Poznan_Hall2 is over 50%, which is considerably larger than that of other sequences. This result is due to the fact that the depth maps of Poznan_Hall2 contain lesser edges and have a larger proportion of flat regions. The proposed algorithm also has advantages compared with other existing algorithms. A subjective quality comparison of synthesized views for Balloons (1 024×768) sequence and Poznan_Hall2 (1 920×1 088) sequence is presented to further evaluate the performance of the proposed algorithm. The results indicate that the quality of decoded synthesized views generated by the proposed algorithm is almost the same as the quality of those generated by the original HTM-13.0. The proposed algorithm can preferably preserve the edge information of depth maps.
Conclusion
The proposed algorithm not only accelerates quad-tree decision but also optimizes the RMD process. The algorithm periodically updates thresholds on the basis of temporal correlation of video sequences to ensure a good video quality of synthesized views. Subjective and objective evaluations show that the proposed algorithm can significantly reduce the computational complexity of depth map intra coding without decreasing the quality of synthesized views. The proposed algorithm also has practical values and can be applied to actual situations. Nonetheless, the proposed algorithm can be further improved. The algorithm optimizes the recursive splitting process of smooth CUs; however, the splitting process of CUs with a complex texture still has high computational complexity. Therefore, effective and efficient ways for reducing the depth levels of CUs with a complex texture will be studied in future research.
Key words
3D-HEVC; computational complexity; depth map; intra coding; coding unit (CU); gradient matrix
0 引言
近年来, 随着科技的发展, 人们随时随地观看视频成为了可能。人们在享受视频的同时也对视频提出了更高的要求:分辨率更高、立体感更强。然而立体视频要传输多个视点的视频信息, 这使得数据量急剧增加, 严重限制了立体视频的发展[。为了克服这个难题, 3D视频编码联合工作组(JCT-3V)开始在高效视频编码(HEVC)标准[的基础上着手制定3D视频的拓展部分, 称为3D高效视频编码(3D-HEVC)标准[。
在3D-HEVC编码框架中, 深度图被引入进来, 形成多视点纹理加深度视频[(MVD)格式的3D视频。随着深度图的使用, 通过使用基于深度的图像绘制技术(BIDR[)能够合成虚拟视点, 从而大大减少需要传输的视点数。与纹理视频不同, 深度视频包含大块的平滑区域和少数的边界信息, 使用传统的HEVC编码方法不能较好地保留边界信息[, 因此一些新的编码技术加入到深度视频的编码中来, 如深度模型模式[(DMM)等。这些编码技术虽然一定程度上提高了压缩效率, 但也大大增加了深度视频的编码复杂度。
为了降低深度图的帧内编码复杂度, 国内外学者做了大量的工作, 取得了显著的成果。在加快搜索最优编码单元(CU)分割方面, 文献[
上述算法在不同程度上降低了深度图的编码时间, 但深度图的编码复杂度仍然较高, 因此本文提出了一种低复杂度的深度图帧内编码快速算法。首先利用基于纹理元的图像分析方法检测CU纹理复杂度, 根据纹理复杂度提前终止CU分割。同时, 对大尺寸PU和小尺寸PU分别提出2个不同的方案来跳过RMD中角度模式的决策过程。
1 深度图帧内预测过程
1.1 HEVC的四叉树分割结构
与传统基于宏块的视频编码不同, HEVC引入了更加灵活的四叉树编码结构[, 它能根据图像纹理复杂度自适应地选择CU的尺寸进行编码, 四叉树编码结构如$RD-cost$), 最后从深度3~0依次比较各层CU的$RD-cost$, 选择$RD-cost$最小的为最佳分割方式。
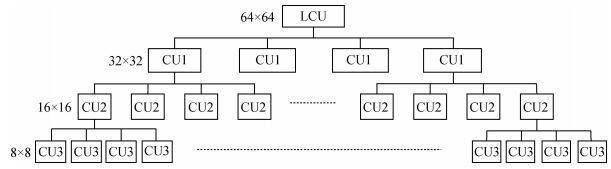


图 1 LCU四叉树编码结构
Fig. 1 Quad-tree coding structure of LCU
1.2 深度图帧内预测过程
深度图帧内预测在35种传统HEVC预测模式的基础上增加了两种DMM模式, 即DMM1和DMM4。首先对当前PU进行粗略的模式选择, 即对35种HEVC帧内预测模式采用式(1) 进行低复杂度率失真计算, 选择$N$种(8×8和4×4的PU为8种, 其他尺寸PU为3种)低复杂度率失真代价最小的模式加入到候选模式列表;然后将MPM模式和DMM模式加入到候选模式列表;最后对候选模式列表中的所有模式进行全率失真计算, 进而选择全率失真代价最小的模式作为当前PU的最优预测模式。
$LCR{D_{{rm{cost}}}} = {D_{{rm{VSO}}}} + lambda times R$
(1)
式中, $D_{rm VSO}$表示虚拟视点失真和当前块的哈达玛系数绝对值和的加权值, $λ$为拉格朗日系数, $R$为采用当前模式编码所需比特数。
2 提出的帧内编码快速算法
本文提出的深度图帧内编码快速算法分为两部分:第1部分对CU分割过程进行优化;第2部分对RMD过程进行优化。
2.1 基于纹理元的CU分割提前决策
深度图与纹理图相比, 深度图的纹理更加简单。
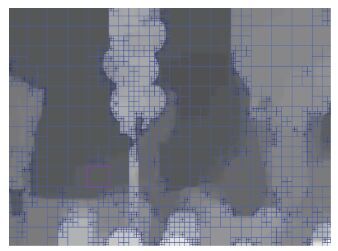
图 2 Balloons深度序列的CU划分结果
Fig. 2 The CU splitting result of depth map in Balloons
深度图平坦区域像素值与其邻近像素的差异很小, 而纹理复杂区域像素值变化非常剧烈, 因此可以利用基于纹理元的图像分析方法检测深度图的纹理复杂度。王成儒等人[提出了一种简单、高效的基于纹理元的图像纹理分析算法, 尺寸为3×3的纹理元如$P$($i$, $j$)表示位置($i$, $j$)上的像素值。
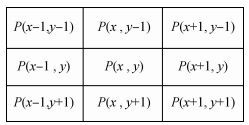
图 3 3×3的纹理元
Fig. 3 Concept of texture primitive
为了表示纹理元的纹理复杂度, 利用式(2) —式(5) 分别计算像素点$P$($x$, $y$)4个方向上的梯度值, 然后用$D$=max{$d_{rm 1}$, $d_{rm 2}$, $d_{rm 3}$, $d_{rm 4}$}来表示该纹理元的最大梯度。
${d_1} = left| {Pleft( {x - 1,{rm{ }}y} right) - Pleft( {x + 1,{rm{ }}y} right)} right|$
(2)
${d_2} = left| {Pleft( {x,{rm{ }}y - 1} right){rm{ }} - Pleft( {x,{rm{ }}y + 1} right)} right|$
(3)
${d_3} = left| {Pleft( {x - 1,{rm{ }}y - 1} right){rm{ }} - Pleft( {x + 1,{rm{ }}y + 1} right)} right|$
(4)
${d_4} = left| {Pleft( {x + 1,{rm{ }}y - 1} right){rm{ }} - Pleft( {x - 1,{rm{ }}y + 1} right)} right|$
(5)
深度图CU除边界以外的像素点都能用式(2) —式(5) 计算该像素点各方向的梯度值, 并得到该纹理元的最大梯度$D$, 进而生成一个($w$-2) ×($w$-2) 大小的梯度矩阵, $w$为CU宽度。$T$来表征CU的纹理复杂度, 即
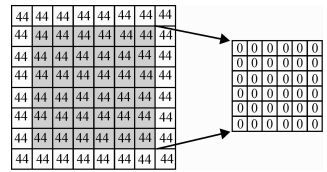
图 4 平坦CU及其梯度矩阵
Fig. 4 Smooth CU and its gradient matrix
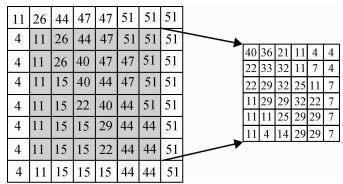
图 5 纹理复杂CU及其梯度矩阵
Fig. 5 Complex texture CU and its gradient matrix
$T = sumlimits_{i = 0}^{left( {w - 2} right){rm{ }} times left( {w - 2} right)} {} {rm{ }}{D_i}$
(6)
式中, $w$为CU的宽度, $D_{i}$为梯度矩阵中的第$i$个梯度值。
通过对深度图的像素进行观察, 可以发现像素是逐步变化的, 当纹理元中心像素$P$($x$, $y$)比相邻8个像素都大或都小时, 则判定该纹理元中心像素$P$($x$, $y$)受到噪声的干扰, 称为反常纹理元。为了降低噪声对本文算法的影响, 在计算CU梯度矩阵之前对CU中反常纹理元采用式(7) 进行平滑处理, 即令中心像素$P$($x$, $y$)为邻近8个像素的平均值, 即
$Pleft( {x,{rm{ }}y} right) = left( {sumlimits_{i = - 1}^1 {} sumlimits_{j = - 1}^1 {} Pleft( {x + i,{rm{ }}y + j} right) - Pleft( {x,{rm{ }}y} right)} right)/8$
(7)
由$T$较小, 而纹理复杂CU的$T$值较大。因此, 当$T$小于一定的阈值$Th$时, CU纹理比较平坦, 则可以提前终止当前CU进一步分割。基于上述分析, 为了权衡编码复杂度和合成视点的失真, 选择视频序列第1帧深度图为训练帧, 计算深度为0、1和2时的阈值$Thc_{i}$, 即
$Th{c_i} = alpha times av{e_i},{rm{ }}quad i in left{ {0,{rm{ }}1,{rm{ }}2} right}$
(8)
式中, $i$为CU深度, $α$为加权值, $ave_{i}$为训练帧中深度为$i$时不分割CU的$T$的平均值。考虑到视频的时间相关性, 每编码30帧重新选择下一帧作为训练帧更新阈值。
由式(8) 可知, $α$的值越大时, 阈值$Thc_{i}$也越大, 则将CU误判为不分割的概率越高, 造成合成视点的失真也就越大。为了找到合适的$α$值, 在全帧内配置下, 对$α$分别为0.6、0.8和1时的测试结果如$T$为深度图变化的编码时间。
表 1
标准测试序列
Table 1
The sequences
分辨率/像素测试序列帧数
1 024×768Balloons300
1 024×768Kendo300
1 024×768Newspaper1300
1 920×1 088GT_Fly200
1 920×1 088Poznan_Hall2250
1 920×1 088Poznan_Street250
1 920×1 088Undo_Dancer250
1 920×1 088Shark300
表 2
不同$α$值下的编码性能
Table 2
The performance of proposed algorithm in different $α$
/%
$α$BDBRΔ$T$
0.60.09-28.76
0.80.16-36.59
10.27-43.57
从$α$的增大, 减少的编码时间越多, 然而合成视点的失真也越大。因此, 当$α$的值为0.8时, 该算法能在编码复杂度和合成视点的失真之间取得较好的平衡。
综上, 提出的CU分割提前决策算法的流程图如
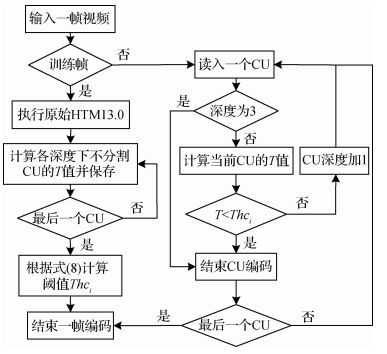
图 6 所提CU分割提前决策算法的流程图
Fig. 6 The flow chart of the proposed fast CU size decision algorithm
2.2 RMD模式快速决策
深度图PU在粗略的模式选择(RMD)过程中需要对35种帧内预测模式进行遍历, 这个过程具有较高的计算复杂度。$LCRD_{rm cost}$)的RMD过程提前终止。
表 3
深度图中各模式所占比例
Table 3
The proportion of different modes in depth maps
/%
测试序列PlanarDC角度DMM
Balloons54.3932.4512.131.01
Kendo55.8433.0710.480.62
Newspaper151.5730.6915.871.88
GT_Fly52.6931.6115.300.41
Poznan_Hall257.1034.608.180.12
Poznan_Street52.6530.3416.270.75
Undo_Dancer53.3331.8614.250.56
Shark56.0934.158.321.45
平均值54.2132.3512.600.85
2.2.1 基于纹理特征的RMD模式快速决策
直观上, PU的最佳模式与PU的纹理特征有很强的相关性。Planar和DC模式是两种非角度模式, 主要适用于方向性不是特别强的PU[。因此, 对于纹理平坦的大块PU, Planar和DC模式被选为最佳预测模式是大概率事件。基于上面的分析, 可以充分利用2.1节计算的CU梯度矩阵的梯度和$T$来对尺寸大于8×8的平坦PU跳过RMD中角度模式的遍历过程。如$T$为0时, 则跳过RMD中模式遍历过程, 仅将Planar和DC模式加入到候选模式列表。$T$为0时, 最佳模式为Planar、DC或MPM模式的概率。
表 4
$T$为0时, 最佳模式为Planar、DC或MPM的概率
Table 4
The proportion of the optimal mode is Planar、DC or MPM in case $T$=0
/%
测试序列$QP$
34394245
Balloons98.0997.7398.0598.18
Kendo97.9897.2797.8898.24
Newspaper196.5797.6098.2398.31
GT_Fly96.0096.6198.0399.64
Poznan_Hall297.8298.2198.6198.77
Poznan_Street96.3598.0298.7799.23
Undo_Dancer97.6997.7298.5798.52
Shark97.8798.1598.3598.68
2.2.2 基于$LCRD_{rm cost}$的RMD过程提前终止
在RMD中, Planar和DC模式最先进行低复杂度率失真计算, 记RMD中对Planar和DC模式进行低复杂度率失真计算后的最小率失真代价为$LCRD_{rm mincost}$。可以发现, 对于8×8和4×4的PU, $LCRD_{rm mincost}$与最佳模式之间存在着紧密的相关性。为了验证该相关性, 对$QP$为34时进行测试, 统计最佳模式为Planar或DC模式的PU的$LCRD_{rm mincost}$均值以及最佳模式为角度模式的PU的$LCRD_{rm mincost}$均值, 结果如
表 5
不同PU的$LCRD_{rm mincost}$均值
Table 5
The mean of $LCRD_{rm mincost}$ in different PUs
测试序列PU 8×8PU 4×4
0或1角度0或1角度
Balloons37010 372451 585
Kendo1434 32627544
Newspaper151816 297622 576
GT_Fly11337228100
Poznan_Hall2215511096
Poznan_Street1411 62134337
Undo_Dancer54241 7396911 235
Shark3129 352582 176
平均值27010 579422 331
注: 0或1表示最佳模式为Planar或DC模式, 角度表示最佳模式为角度模式。
从$LCRD_{rm mincost}$均值较小;而最佳模式为角度模式时, PU的$LCRD_{rm mincost}$均值大得多。这是因为当PU的$LCRD_{rm mincost}$较小时, 采用Planar或DC模式能准确对当前PU进行预测, 则Planar或DC模式成为最佳模式的概率较大;反之, 当PU的$LCRD_{rm mincost}$较大时, 采用Planar或DC模式不能对当前PU进行准确的预测, 而角度模式成为最佳模式的概率也较高。因此, 在RMD中对Planar和DC模式进行低复杂度率失真计算后, 若$LCRD_{rm mincost}$小于一定的阈值时, 跳过角度模式的遍历过程;否则, 继续对33种角度模式进行遍历。
考虑到不同视频序列纹理的差异, 本文采用测试序列第1帧深度图为训练帧, 选择训练帧中最佳模式为Planar或DC模式的PU的$LCRD_{rm mincost}$均值为阈值$Th_{i×i}$, 同样每编码30帧更新一次阈值, 其中$i×i$为8×8或4×4。为了验证该阈值选取的合理性, 对$LCRD_{rm mincost}$小于$Th_{i×i}$时, 最佳模式为Planar、DC或MPM模式的概率, 结果如$LCRD_{rm mincost}$小于$Th_{i×i}$时, 最佳模式来源于Planar、DC或MPM模式的概率高达97%以上。所以提出的基于$LCRD_{rm cost}$的RMD过程提前终止方案如下:对于尺寸为8×8和4×4的PU, 当Planar和DC模式进行低复杂度率失真计算后的$LCRD_{rm mincost}$小于$Th_{i×i}$时, 提前终止RMD过程, 跳过余下33种角度模式的遍历过程。
表 6
$LCRD_{rm mincost}
Table 6
The proportion of the optimal mode is Planar、DC or MPM in case $LCRD_{rm mincost}
/%
测试序列$QP$
34394245
Balloons99.2999.6099.5699.61
Kendo99.6799.7399.6699.65
Newspaper197.5098.8199.0599.29
GT_Fly99.7099.8899.96100.00
Poznan_Hall299.9699.9999.9799.95
Poznan_Street98.3999.5699.7999.95
Undo_Dancer99.0599.7899.8999.84
Shark99.2999.7899.7899.64
综上, 对2.2.1节和2.2.2节算法进行整合, 得到总的RMD模式快速决策算法流程图如
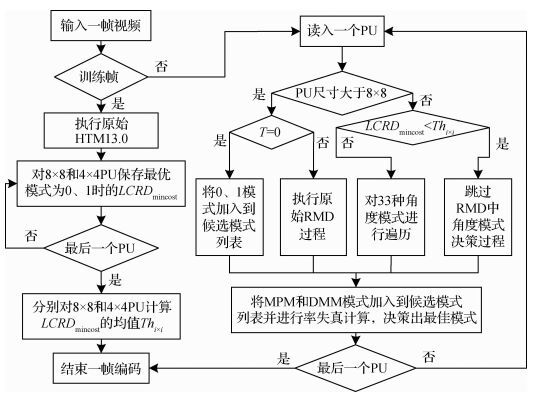
图 7 所提RMD模式快速决策算法的流程图
Fig. 7 The flow chart of the proposed fast mode decision algorithm in RMD
3 实验结果与分析
为了对本文算法的编码性能进行评价, 将算法在3D-HEVC标准测试平台HTM13.0[上进行实现, 并将本文算法分别与文献[
1) 采用3视点加深度视频的全帧内编码配置文件。
2) 量化参数为(25, 34)、(30, 39)、(35, 42) 和(40, 45), 括号中第1个数为纹理视频的量化参数, 第2个为深度视频的量化参数。
3) CU的深度级设为0~3。
4) VSO和RDOQ为开启状态。
为了直观地反映深度图编码复杂度的降低和编码性能的损失情况, 本文分别与采用文献[$T$来表示。其中BDBR为编码后纹理视频和深度视频总的比特率与合成视点的PSNR计算得到。Δ$T$为与原始HTM13.0算法相比, 采用本文算法后深度图减少的编码时间, 具体计算公式为
$Delta T = frac{{{T_{{rm{pro}}}} - {T_{{rm{HTM13}}{rm{.0}}}}}}{{{T_{{rm{HTM13}}{rm{.0}}}}}} times 100% $
(9)
式中, $T_{rm HTM13.0}$为采用原始HTM13.0算法时深度图的编码时间, $T_{rm pro}$为采用本文算法时深度图的编码时间。
本文算法与文献[
表 7
不同算法的编码性能比较
Table 7
Simulation results of state-of-the-art algorithms and the proposed algorithm
/%
测试序列文献[文献[文献[CU提前决策算法本文算法
BDBRΔ$T$BDBRΔ$T$BDBRΔ$T$BDBRΔ$T$BDBRΔ$T$
Balloons1.41-640.03-8.420.68-31.610.05-31.220.05-37.03
Kendo1.02-620.08-10.20.68-32.330.12-34.270.15-40.53
Newspaper10.77-490.16-4.260.94-30.210.19-28.190.24-34.77
GT_Fly0.85-740.02-6.100.37-38.390.09-34.270.09-37.68
Poznan_Hall21.71-720.47-16.150.52-31.800.49-47.570.48-51.42
Poznan_Street1.63-530.006.510.29-31.110.21-30.810.20-36.75
Undo_Dancer1.45-680.14-5.730.29-34.430.08-41.870.09-44.65
Shark--0.003.250.52-33.080.05-38.890.06-42.26
平均值1.26-630.11-5.140.54-32.870.16-35.880.17-40.64
与文献[
与文献[
与文献[
$QP$为25时得到。
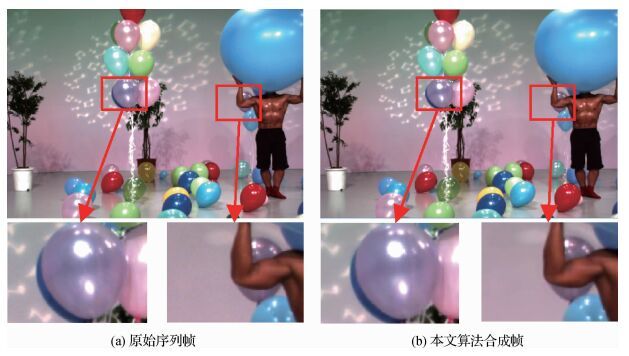
图 8 Balloons序列合成视点及放大区域的主观质量比较图(视点1, 第10帧)
Fig. 8 The subjective quality compared results for sequence "Balloons" (view 1, 10$^{rm th}$ frame)((a) original video frame; (b)ours)
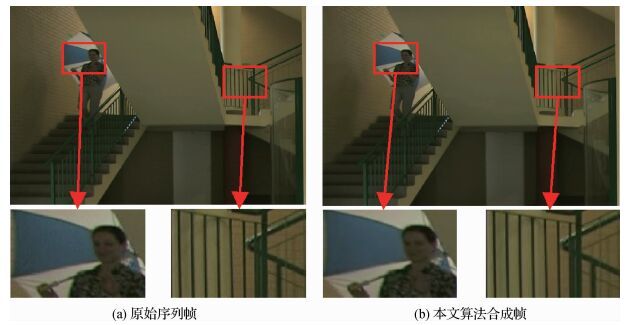
图 9 Poznan_Hall2序列合成视点及放大区域的主观质量比较图(视点3, 第15帧)
Fig. 9 The subjective quality compared results for sequence "Poznan_Hall2" (view 3, 15$^{rm th}$ frame)((a) original video frame; (b)ours)
4 结论
为了降低深度视频的编码复杂度, 本文提出了一种深度图帧内编码快速算法。首先, 通过基于纹理元的图像分析方法检测深度CU的纹理复杂度, 对纹理平坦的CU提前终止分割进程;其次, 在统计Planar和DC模式进行低复杂度率失真计算后的最小率失真代价与最佳预测模式之间关系的基础上, 结合纹理特征, 对满足条件的PU跳过RMD中角度模式的决策过程, 进一步降低深度图的编码复杂度。实验结果表明, 与原始HTM13.0算法相比, 本文算法在合成视点平均比特率增加0.17%的条件下减少了40.64%的深度图编码时间。同时, 本文所提算法采用训练帧计算阈值并以一定的周期进行更新, 具有较强的自适应能力。由于本文CU分割提前决策算法仅对平坦CU进行处理, 纹理复杂CU的分割过程仍然存在一定的优化空间。因此, 如何优化纹理复杂CU的分割过程将是下一步研究方向。
参考文献
[1]
Zhang Q W, An P, Zhang Y, et al.Depth map intra coding based on virtual view rendering distortion estimation[J].
Journal of Electronics and Information Technology, 2011, 33(11): 2541–2546.
[张秋闻, 安平, 张艳, 等.
基于虚拟视点绘制失真估计的深度图帧内编码[J]. 电子与信息学报, 2011, 33(11): 2541–2546.
]
[DOI:10.3724/SP.J.1146.2011.00218]
[2]
Sullivan G J, Ohm J, Han W J, et al.Overview of the high efficiency video coding (HEVC) standard[J].
IEEE Transactions on circuits and systems for video technology, 2012, 22(12): 1649–1668.
[DOI:10.1109/TCSVT.2012.2221191]
[3]
Sullivan G J, Boyce J M, Chen Y, et al.Standardized extensions of high efficiency video coding (HEVC)[J].
IEEE Journal of selected topics in Signal Processing, 2013, 7(6): 1001–1016.
[DOI:10.1109/JSTSP.2013.2283657]
[4]
Kauff P, Atzpadin N, Fehn C, et al.Depth map creation and image-based rendering for advanced 3DTV services providing interoperability and scalability[J].
Signal Processing:Image Communication, 2007, 22(2): 217–234.
[DOI:10.1016/j.image.2006.11.013]
[5]
Fehn C. Depth-image-based rendering(DIBR), compression, and transmission for a new approach on 3 D-TV[C]//Proceedings of SPIE. San Jose, CA, USA:SPIE, 2004, 5291(2):93-104.[DOI:10.1117/12. 524762]
[6]
Zhang Y, Zhu C, Lin Y, et al. Simplified reference pixel selection for constant partition value coding in 3D-HEVC[C]//Signal and Information Processing (ChinaSIP), 2015 IEEE China Summit and International Conference on. Chengdu, China:IEEE, 2015:244-248.[DOI:10.1109/ChinaSIP.2015.7230400]
[7]
Merkle P, Müller K, Wiegand T. Coding of depth signals for 3D video using wedgelet block segmentation with residual adaptation[C]//Multimedia and Expo (ICME), 2013 IEEE International Conference on. San Jose, CA, USA:IEEE, 2013:1-6.[DOI:10.1109/ICME.2013.6607429]
[8]
Zhang H B, Fu C H, Su W M, et al.Fast coding unit decision algorithm for depth intra coding in 3D-HEVC[J].
Journal of electronics and information technology, 2016, 38(10): 2523–2530.
[张洪彬, 伏长虹, 苏卫民, 等.
3D-HEVC深度图像帧内编码单元划分快速算法[J]. 电子与信息学报, 2016, 38(10): 2523–2530.
]
[DOI:10.11999/JEIT151426]
[9]
Kim M, Ling N, Song L. Fast single depth intra mode decision for depth map coding in 3D-HEVC[C]//Multimedia & Expo Workshops (ICMEW), 2015 IEEE International Conference on. Turin, Italy:IEEE, 2015:1-6.[DOI:10.1109/ICMEW.2015.7169769]
[10]
Park C S.Edge-based intra mode selection for depth-map coding in 3D-HEVC[J].
IEEE Transcation on Image Processing, 2015, 24(1): 155–162.
[DOI:10.1109/TIP.2014.2375653]
[11]
Zhang H B, Tsang S H, Chan Y L, et al. Early determination of intra mode and segment-wise DC coding for depth map based on hierarchical coding structure in 3D-HEVC[C]//Signal and Information Processing Association Annual Summit and Conference (APSIPA), 2015 Asia-Pacific. Hong Kong, China:IEEE, 2015:374-378.[DOI:10.1109/APSIPA.2015.7415297]
[12]
Marpe D, Schwarz H, Bosse S, et al.Video compression using nested quadtree structures, leaf merging, and improved techniques for motion representation and entropy coding[J].
IEEE Transactions on Circuits and Systems for Video Technology, 2010, 20(12): 1676–1687.
[DOI:10.1109/TCSVT.2010.2092615]
[13]
Wang C R, Zhang T.A fast image texture analysis algorithm[J].
Opto-Electronic Engineering, 2005, 32(1): 74–76.
[王成儒, 张涛.
一种快速图像纹理分析算法[J]. 光电工程, 2005, 32(1): 74–76.
]
[DOI:10.3969/j.issn.1003-501X.2005.01.020]
[14]
Lainema J, Bossen F, Han W J, et al.Intra coding of the HEVC standard[J].
IEEE Transactions on Circuits and Systems for Video Technology, 2012, 22(12): 1792–1801.
[DOI:10.1109/TCSVT.2012.2221525]
[15]
MPEG 3D-HTM Software V13.0.[CP].[2015-09-08] http://hevc.kw.bbc.co.uk/git/w/jctvc-3de.git
标签:
相关文章
-
无相关信息