ros平台下基于激光slam的室内导航机器人搭建(三)
第三篇:底层驱动板开发
前言
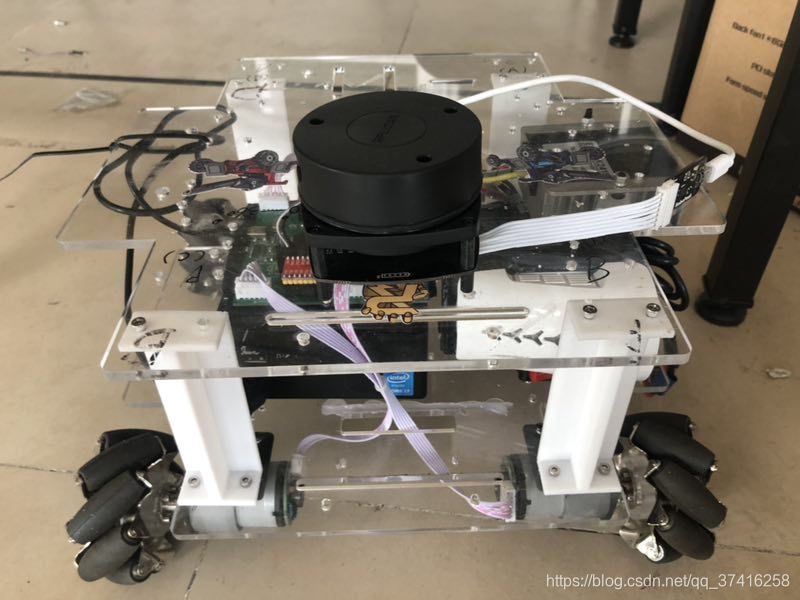
这篇博客主要讲述底层驱动板的开发,底层驱动板的作用是控制机器人的移动,首先给大家看一下成品图。
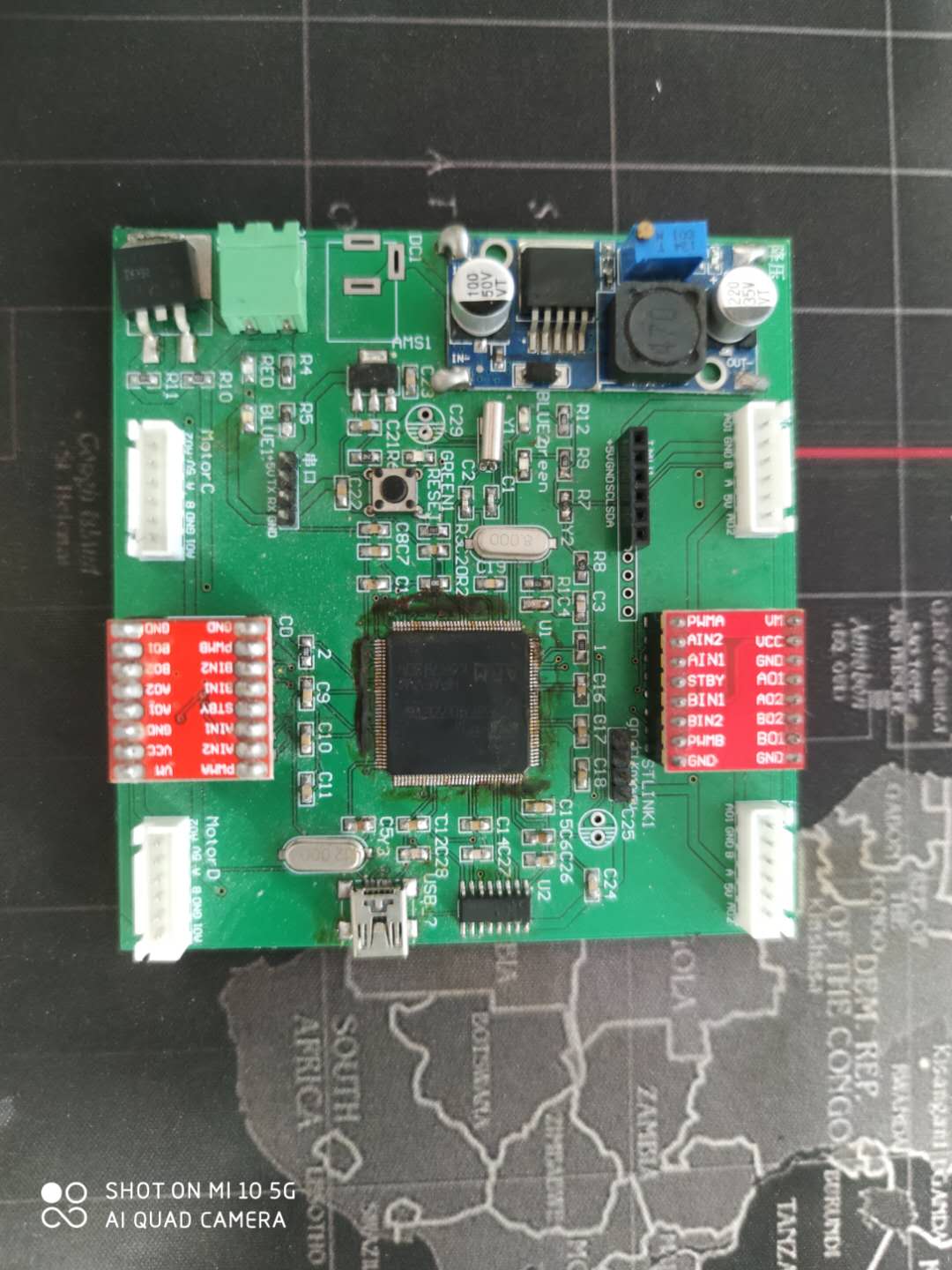
这块板子的原理图和PCB我放在第一篇博客了,大家可以自行下载。
这块板子主要的任务分为三大部分,一是控制四个电机的转速,二是通过电机转速计算出实时速度,三是通过串口将实时速度上传至运行ros的上位机。下面我将分别讲述各部分的开发。
一、资源分配
主控芯片我采用的是STM32F407ZET6
定时器1用于输出四轮PWM,分别控制四个轮子转速
定时器2用于产生rosserial通信的时间戳
定时器3用于读取A轮编码器
定时器4用于读取B轮编码器
定时器5用于读取C轮编码器
定时器8用于读取D轮编码器
定时器6用于定时往上位机发布机器人的实时速度
串口1用于rosserial通信,同时开启对应的DMA
IIC1引出来预留着,方便以后扩展IMU,但是这次我没有用上IMU
以上资源配置的具体参数参考我发布的工程文件里面的wyu_robot.ioc文件
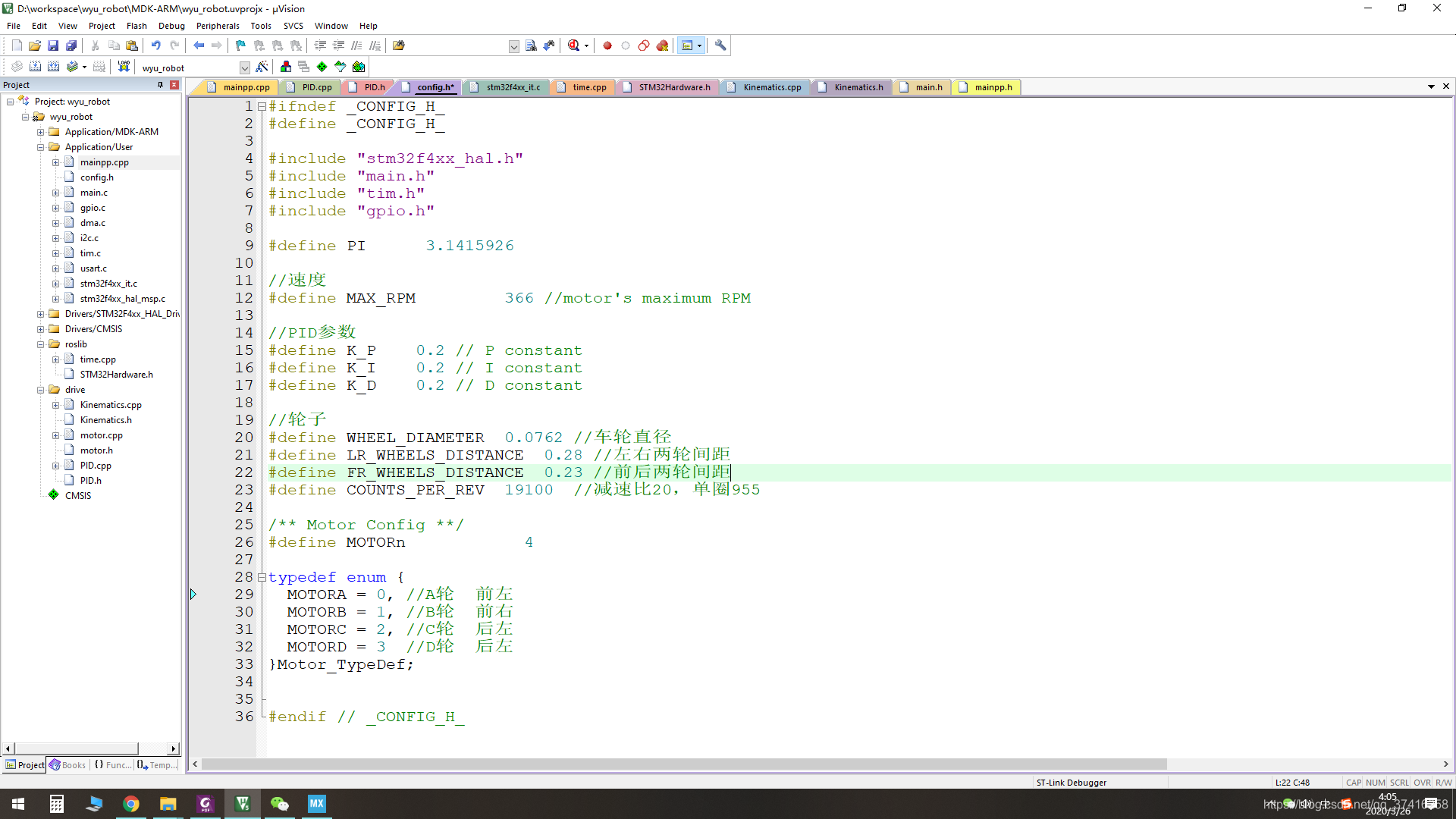
二、基本参数
底盘的基本参数写在config.h文件里,如果切换机器人底盘,只需要修改一下参数就可以很方便的移植代码。
三、电机控制
这个机器人一共有四个电机,我们需要分别计算出每个电机的转速,然后用PID算法控制转速。
TB6612
电机驱动板是TB6612


TB6612可以通过PWM波的占空比不同来控制输出电压的线性变化,因此可以通过PID算法计算出对应的占空比来控制电机的转速。
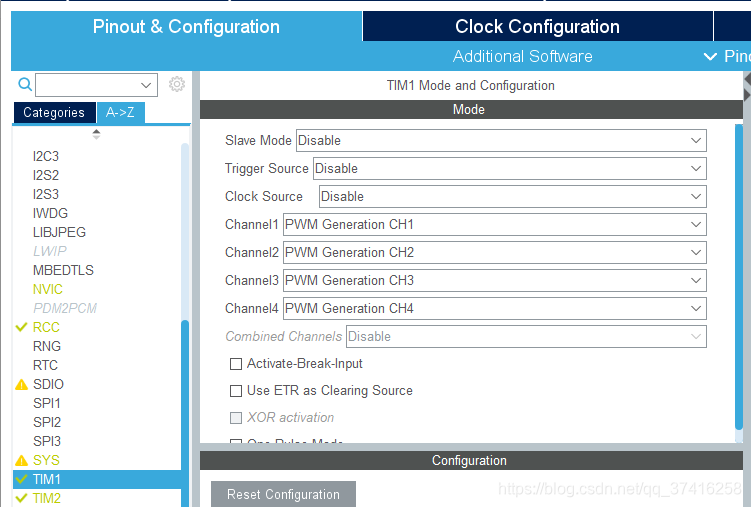
定时器1可以输出4路PWM波,刚好可以控制四个轮子。
下面是cubemx的定时器1设置,可以看到我设置了四路PWM输出端,它们分别引到两块TB6612的四个PWM引脚。
运动学计算Kinematics
这个文件的作用是速度分解,就是将底盘的移动速度拆解成四个轮子的转速,或者通过四个的转速计算出底盘的移动速度。
PID算法
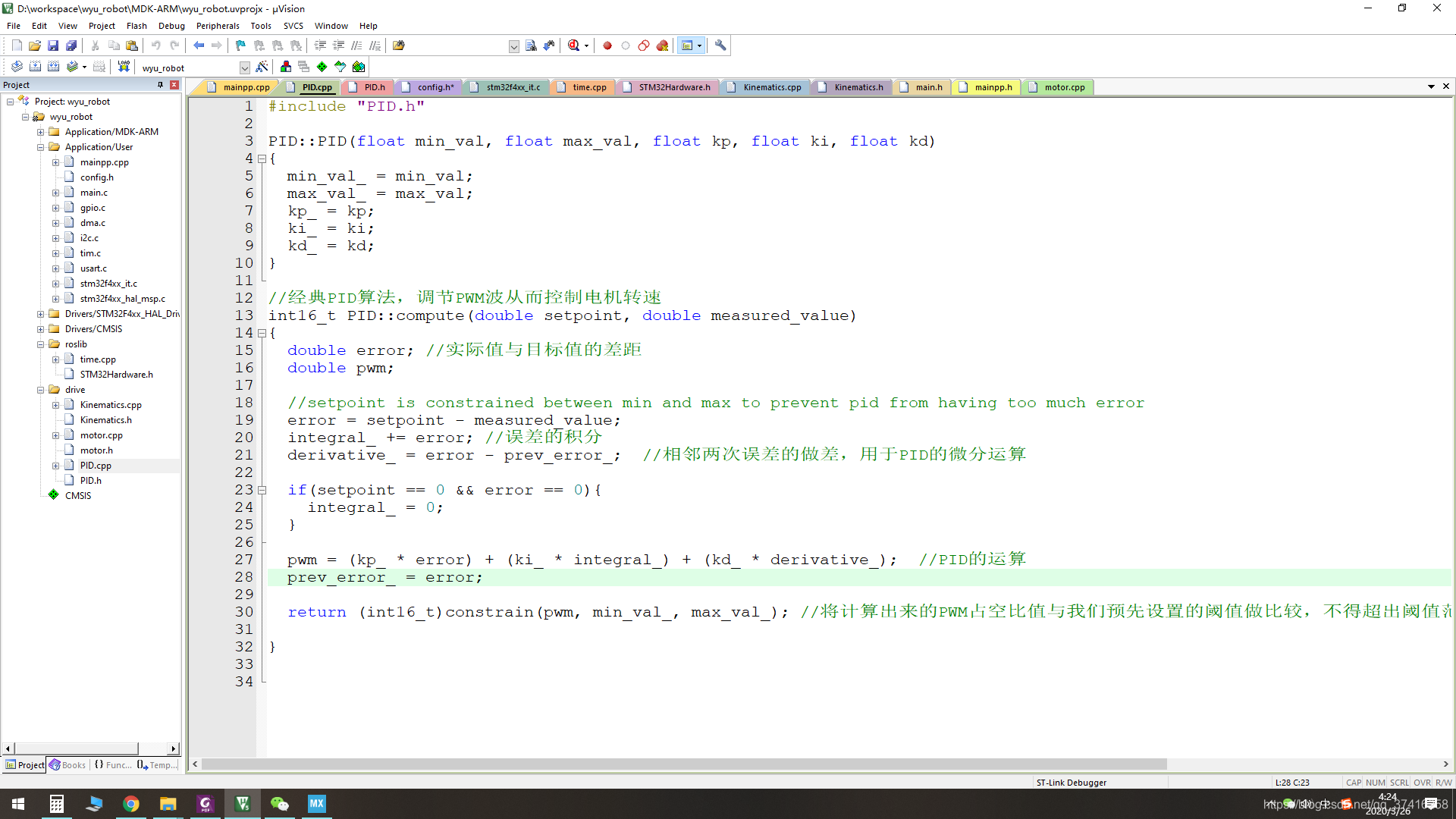
对于没使用过PID算法的人来说,这里可能是个难点,所以我这里给大家讲解一下这个算法的思路。
PID算法是经典的控制算法,在这里我使用它控制轮子的转速。
首先我们先明确控制量,那就是PWM波的占空比,占空比越大,电机转的越快,占空比越小,则电机转的越慢。因此不难想到,当需要增速时,我们需要增加电压(增大占空比),当需要减速时,我们需要减小电压(减小真空比)。
P I D三个参数分别代表比例 积分 微分
P:比例参数,假设目标值与实际值相差X个单位,则给输出补偿P * X个单位,由于P是个固定的常数,因此P是比例调节。
I:积分参数,设X的积分为Y,给输出补偿I * Y个单位,用于消除P无法消除的稳态误差,也叫滞后调节。
D:微分参数,设当前X与上一次X的差值为Z,则给输出补偿D * Z个单位,这个差值反应了误差的加速度,根据误差增减的趋势提前调节,因此也叫超前调节。
因此不难看出PID算法的思想就是补偿,少了就补多一点,多了就补偿负值。这个慢慢体会。
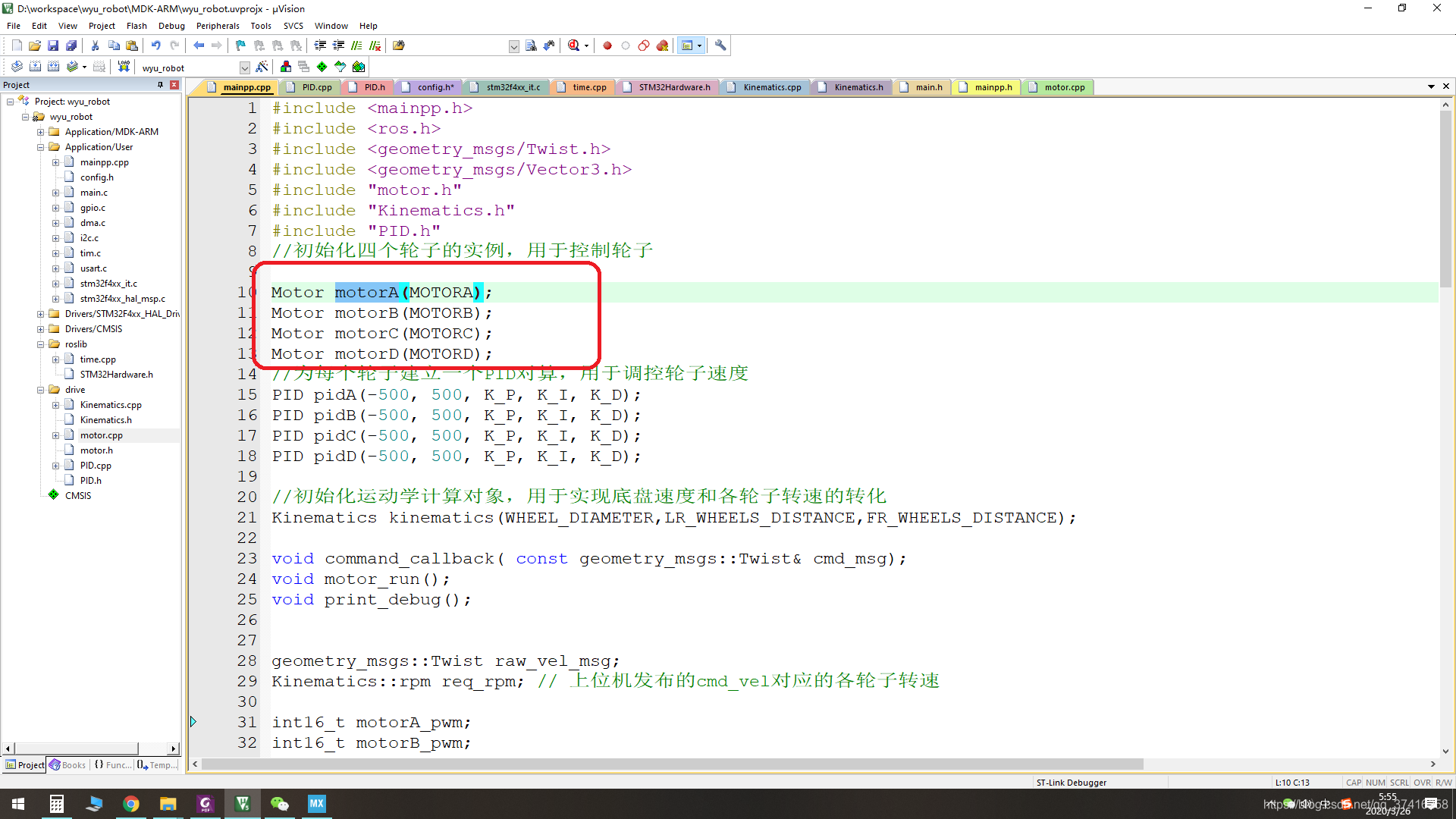
电机转速设置
为了提高代码的可移植行,我使用了C++来开发STM32,因此我使用了C++的面向对象特性来开发电机,首先将电机封装成一个类,然后实例化出四个电机对象,分别为motorA motorB motorC motorD,
每个对象控制一个电机。同时可以看到我还将PID算法封装成了类,和电机一样实例化了四个PID对象,分别用于四个电机的PID计算。设置电机的转速只需要调用对应的电机对象来进行操作就可以了。
例如设置电机motorA 的转速:
motorA.spin(motorA_pwm);
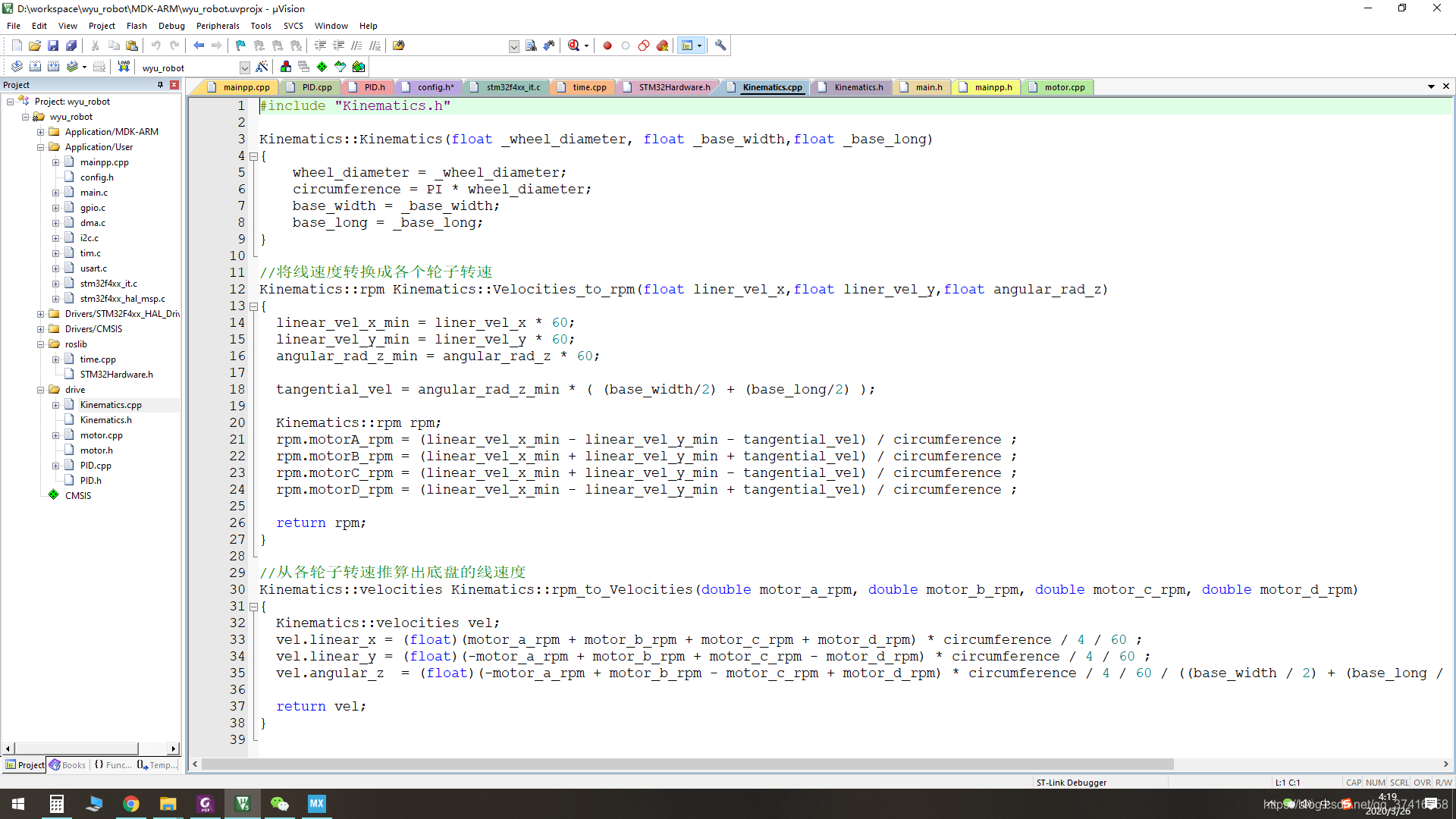
四、计算底盘速度
通过运动学计算,将四个轮子转速转换为底盘移动速度
Kinematics::velocities Kinematics::rpm_to_Velocities(double motor_a_rpm, double motor_b_rpm, double motor_c_rpm, double motor_d_rpm)
{Kinematics::velocities vel;vel.linear_x = (float)(motor_a_rpm + motor_b_rpm + motor_c_rpm + motor_d_rpm) * circumference / 4 / 60 ; vel.linear_y = (float)(-motor_a_rpm + motor_b_rpm + motor_c_rpm - motor_d_rpm) * circumference / 4 / 60 ; vel.angular_z = (float)(-motor_a_rpm + motor_b_rpm - motor_c_rpm + motor_d_rpm) * circumference / 4 / 60 / ((base_width / 2) + (base_long / 2));return vel;
}
五、rosserial协议的移植
由于上位机运行了ros系统,因此可以使用rosserial协议进行串口传输,这样做的好处是,我们STM32的开发可以使用ros的一些特性,比如发布话题和订阅话题,由于该步骤比较复杂,因此我专门写了一个协议的移植教程。具体的步骤大家可以看我另一篇博客rosserial协议移植教程。
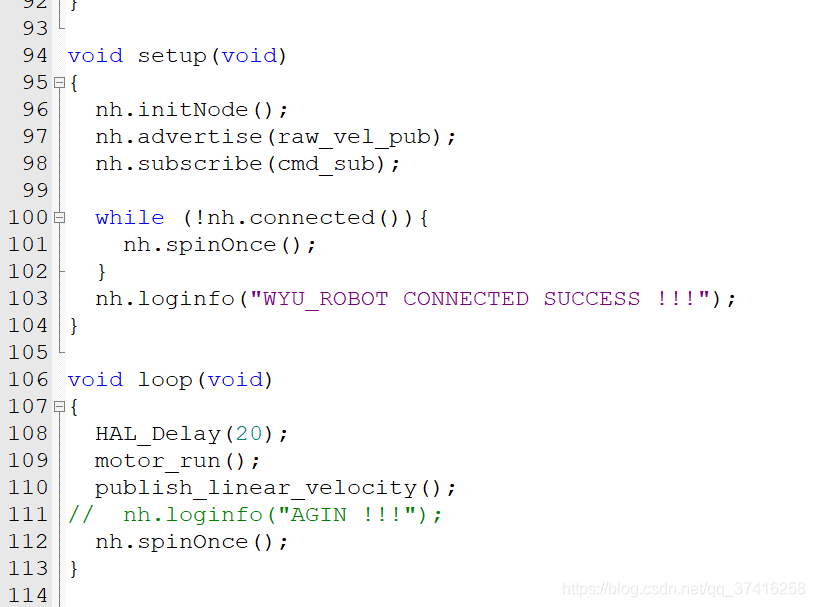
六、订阅和发布话题
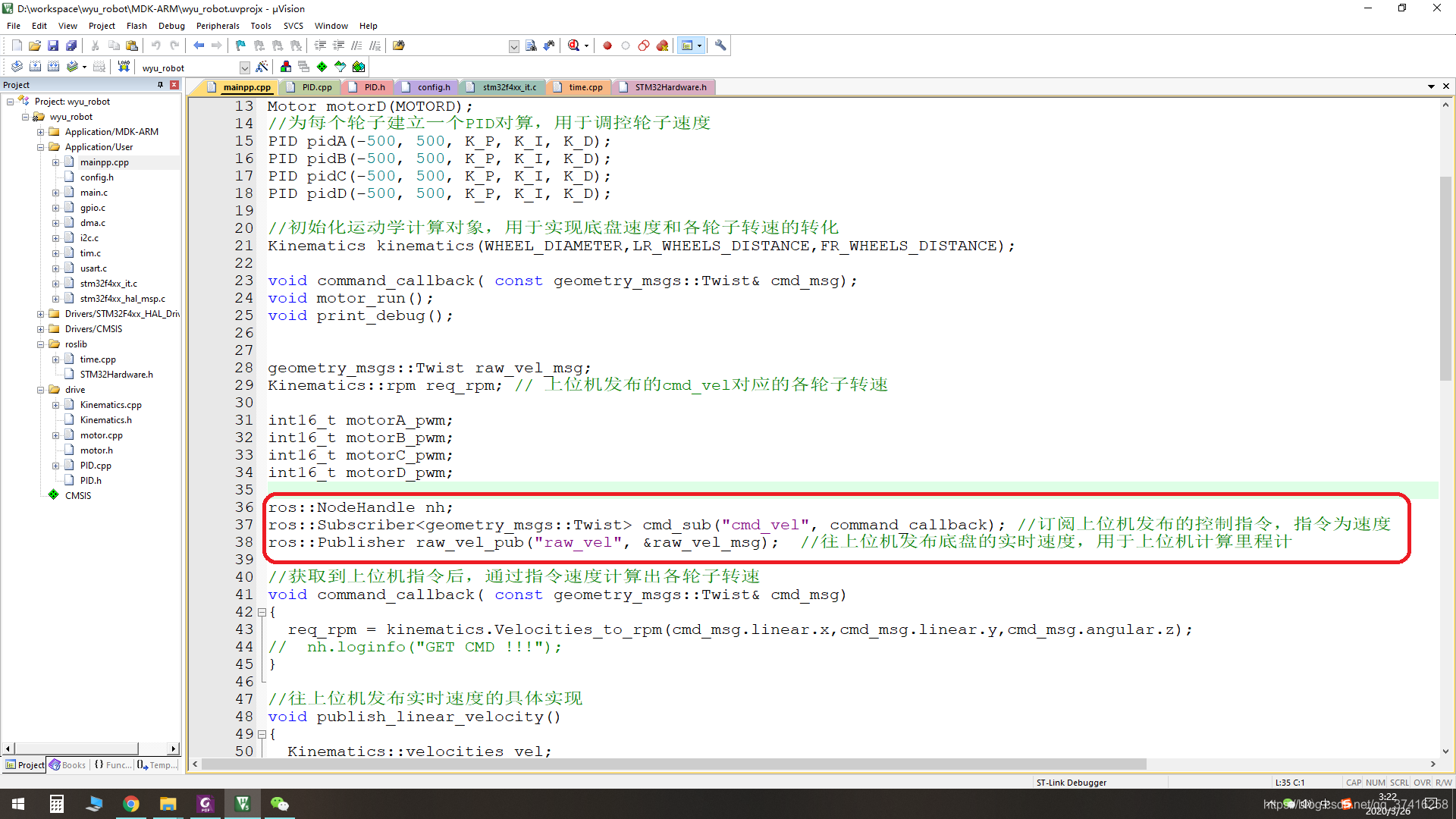
在mainpp.cpp文件里我们需要使用rosserial建立两个节点,如上图所示
一个节点用于订阅上位机发布的指令速度话题(这个话题的作用是上位机给驱动板发布速度指令,驱动板需要控制机器人的移动速度与指令速度一样,说白了就是上位机告诉底层驱动板,机器人需要跑这么快)。在这个工程中,我使用定时器6设置每经过100ms,STM32读取一次速度信息。
第二个节用于发布速度信息,就是底层驱动板告诉上位机我现在的速度是多少,这个数据的作用是构建里程计数据,上位机接收到这个数据后,会进行积分,然后可以推断出机器人的位移,这样就可以配合雷达数据构建地图。在这个工程中,我使用定时器6设置每经过20ms,STM32就往上位机发布一次速度信息,并且更新电机转速。
七、总结
1、每20ms发布一次底盘速度信息并更新电机转速。
2、每100ms读取一次指令速度。
 xt_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzM3NDE2MjU4,size_16,color_FFFFFF,t_70)
xt_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzM3NDE2MjU4,size_16,color_FFFFFF,t_70)
标签:
相关文章
-
无相关信息