菜鸟看论文——U-V-Disparity与地面检测、相机姿态估计
菜鸟看论文——U-V-Disparity与地面检测、相机姿态估计
本文转载自:https://www.oipapio.com/cn/article-4924327
部分PPT地址:https://download.csdn.net/download/qq_326324545/11260394
首先,本部分ppt是由我的师妹王童鞋制作,此处应有掌声~
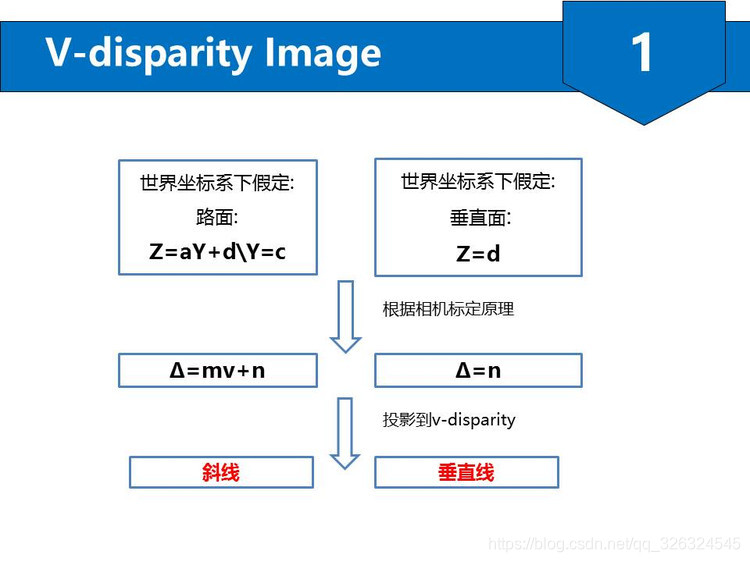
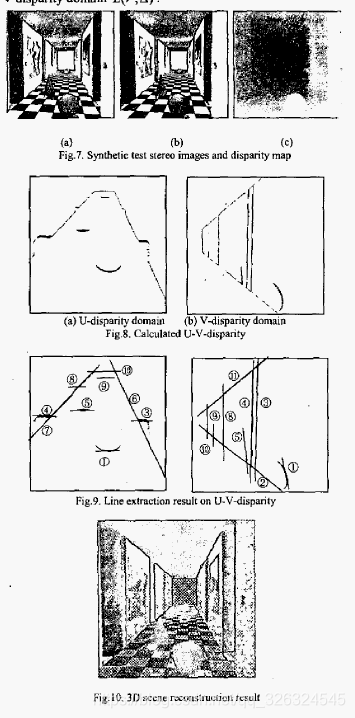
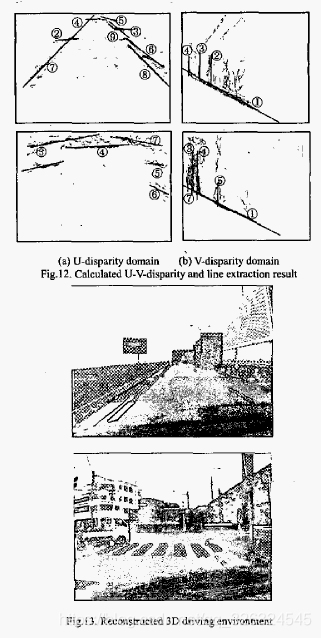
一、U-V-Disparity基础知识

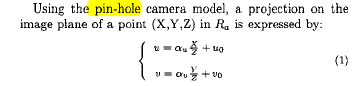
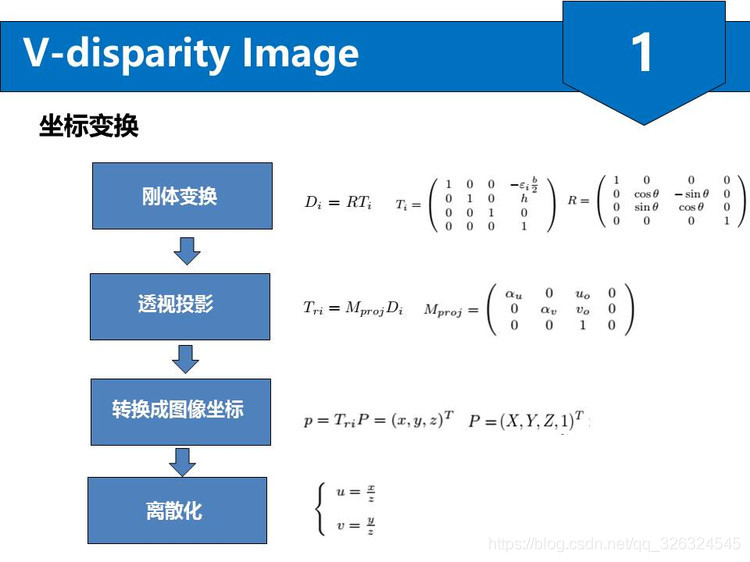
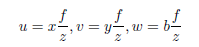
注意,此处的(x,y,z)没有实际意义,其实是(uZc,vZc,Zc)的简写而已,所以求(u,v)时候需要经过下一步才行:

其中z=Zc。
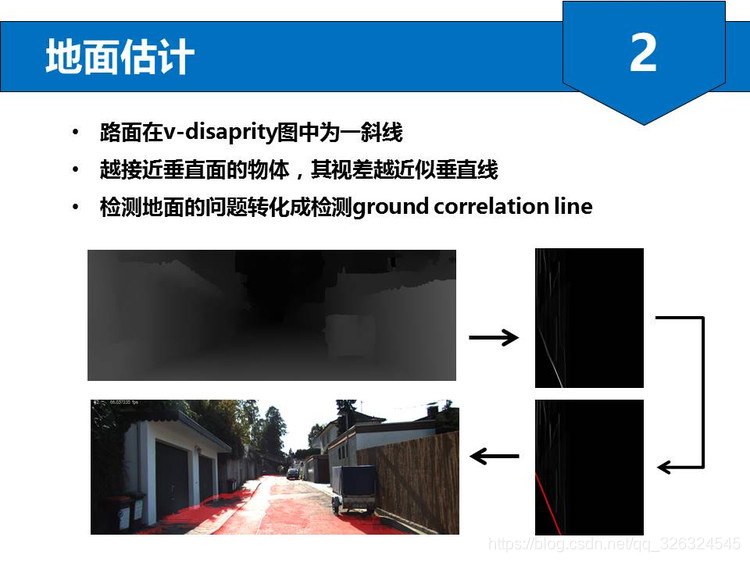
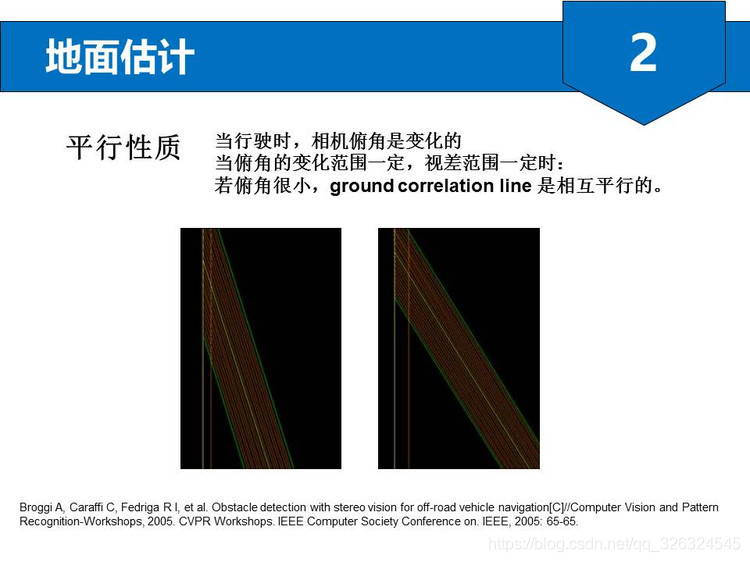
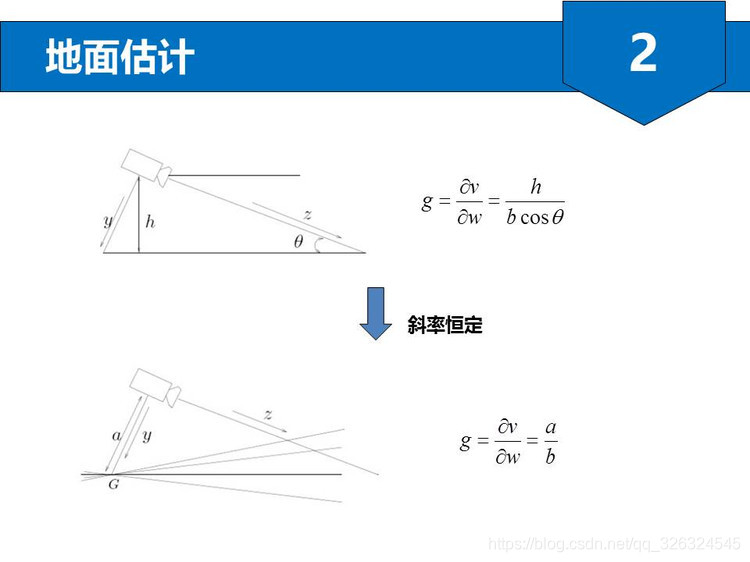
二、地面估计
参考:02.Real time obstacle detection on non flat road geometry through v-disparity representation
参考:
15.Ground Segmentation and Occupancy Grid Generation Using Probability Fields
05.U-V-Disparity: An efficient algorithm for Stereovision Based Scene Analysis
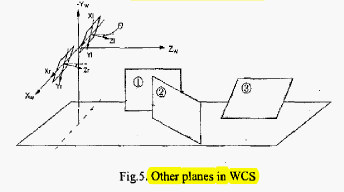
示例2:
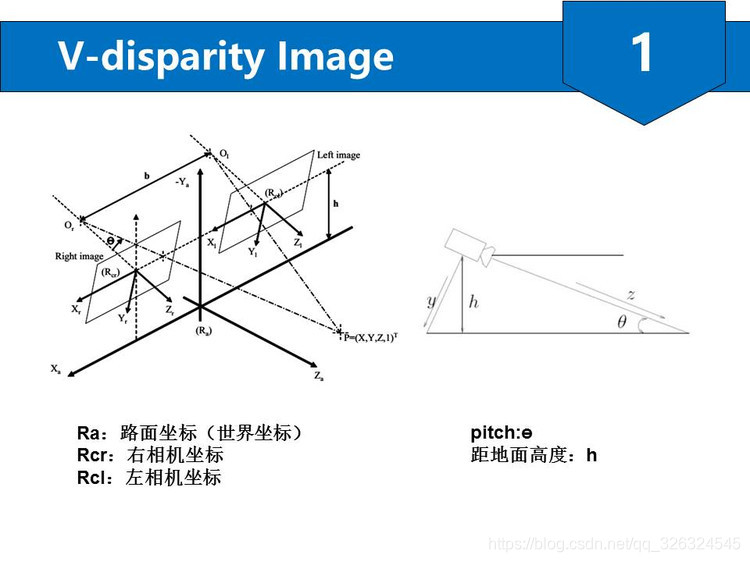
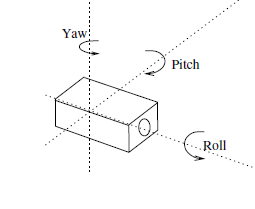
An assumption in our proposed system is that the stereo rig can only rotate in the pitch and yaw angle, q;f,and as such no angular rotation occurs in the roll direction
注意和上面的区别在于没有高度h的位移。
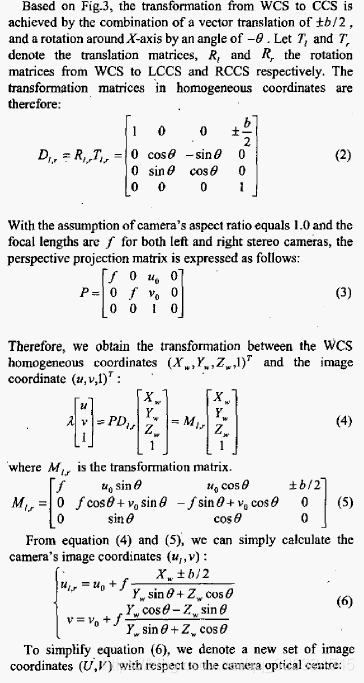
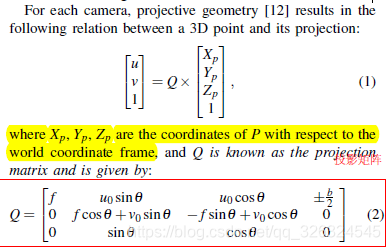
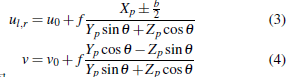
Expanding (1) the image coordinates of a point P are:
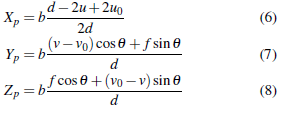
The epipolar constraint reduces the search for corresponding pixels in the two images to a 1-D search problem along the epipolar line. The disparity d of the matched feature is thus calculated as:

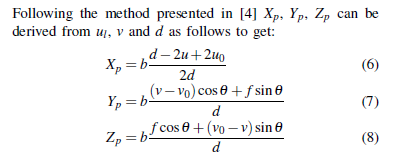
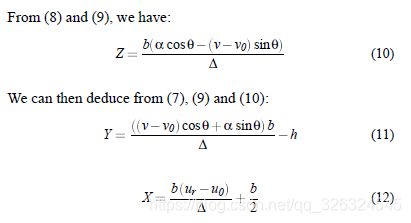
Following the method presented in [4] Xp, Yp, Zp can be derived from ul , v and d as follows to get:
参考:03. A single framework for vehicle roll, pitch, yaw estimation and obstacles detection by stereovision

三、 相机姿态与几何
参考:
07.Global Correlation Based Ground Plane Estimation Using V-Disparity Image
05.Obstacle Detection with Stereo Vision for Off-Road Vehicle Navigation
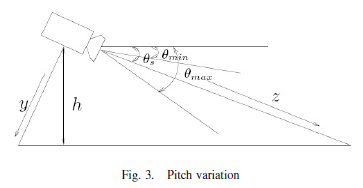
1.Pitch估计
The behavior of the ground correlation line during a pitch variation is to oscillate, parallel to itself. Experimentally, we found out that the cameras height variation due to oscillation has neglectable effects.
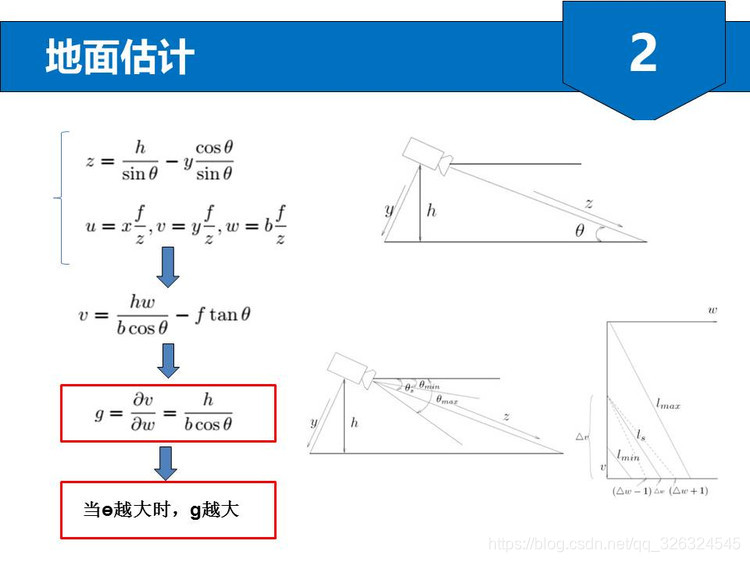
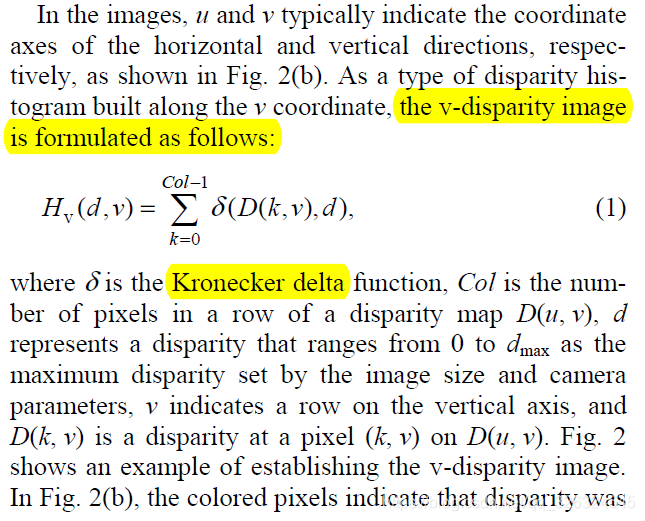
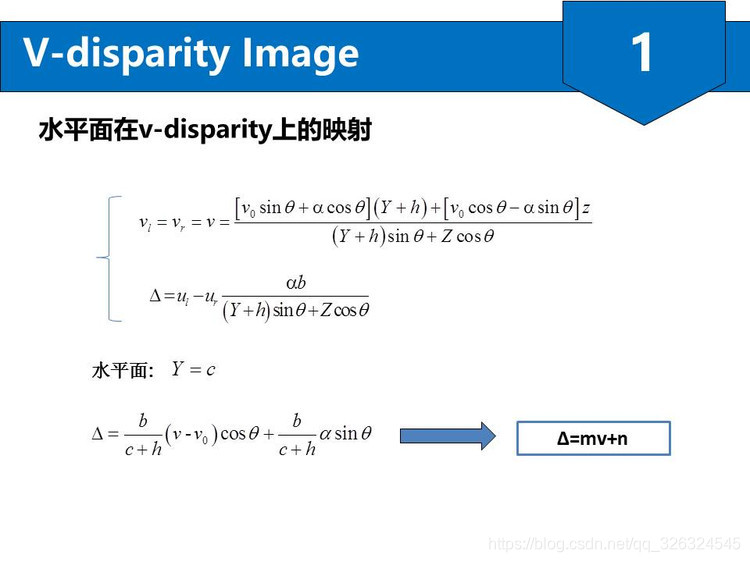
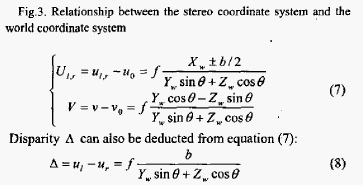
其中,y,z都是是点(x,y,z)的相机坐标,而不是世界坐标,(u,v)是相机物理坐标,而不是相机像素坐标。高度是相机垂直于地面的高度,角度是相机与地面的夹角,高度和角度都是变化的。w是视差。从而得到v(图像物理坐标,而不是像素坐标)和视差(图像物理坐标,而不是像素坐标)的斜率公式:
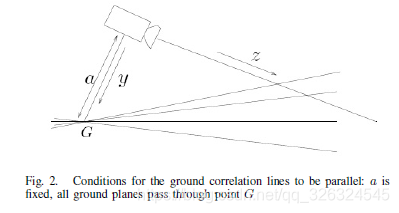
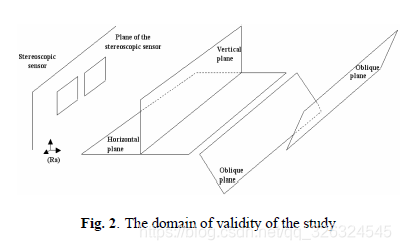
Actually, for the ground correlation lines to be exactly parallel to each other, it should satisfy the conditions shown in Fig. 2. In this figure,the y axis intersects the ground plane through the point G, the distance(a) between camera and G is fixed, and all different ground planes pass through point G. In this situation, the ground plane can be represented as
At different pitch angles shown in Fig. 3, the slope of ground plane in V-disparity image will be different(此时,y不是恒定的,而h是恒定的).
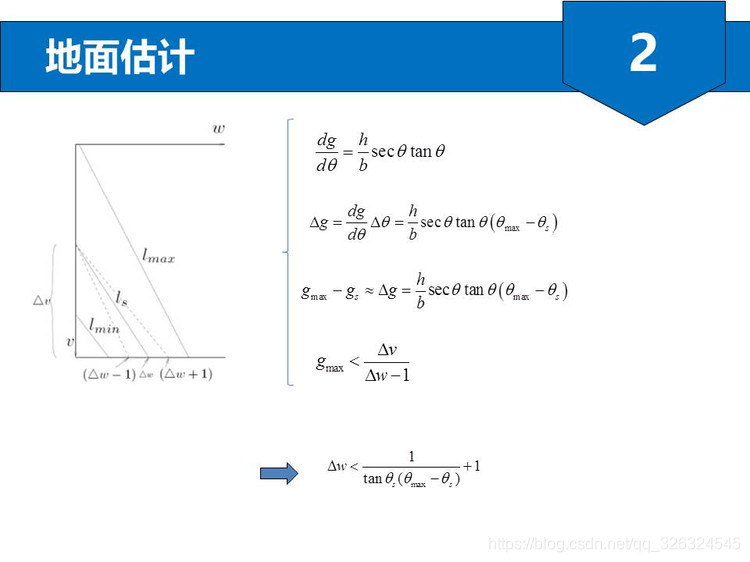
The changing ratio of g
approaches 0 when is small, and

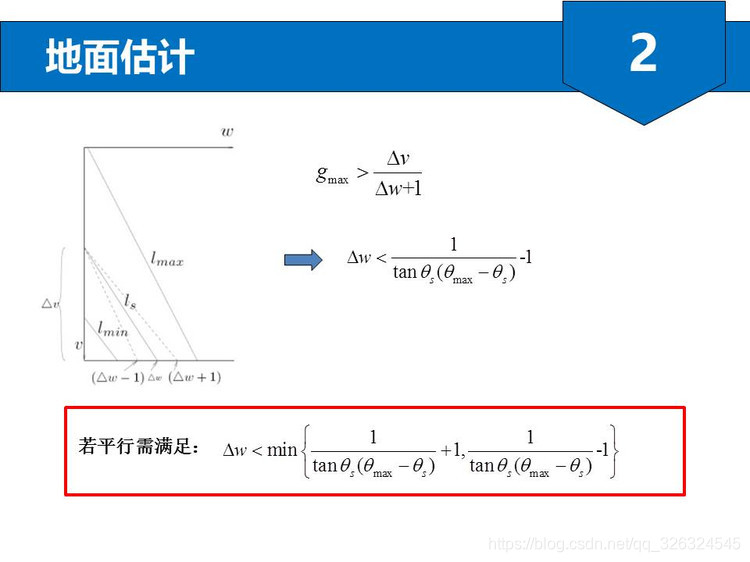
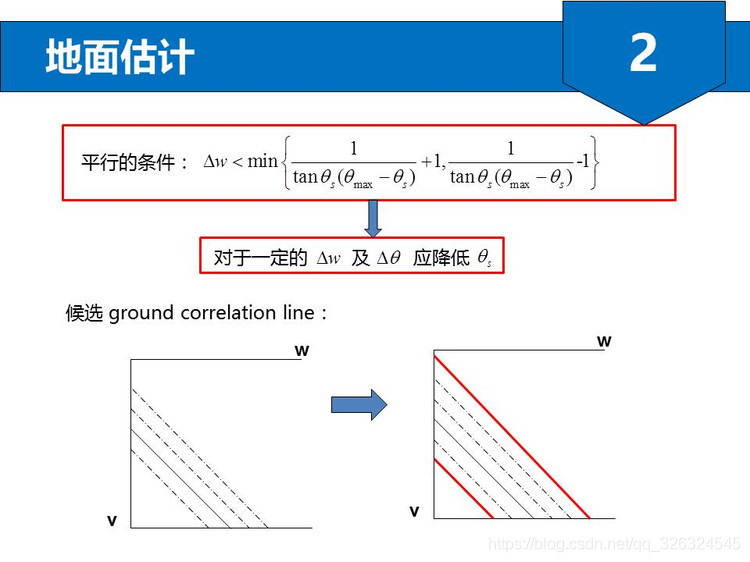
For the ground correlation lines to be parallel with each other at different pitch angles, it only need to satisfy Eq. 11.Thus for a given 4w and certain pitch oscillation, we need to reduce s. In [10], the tilt angle is 8.5. In [1], the tilt angle is 7.73.
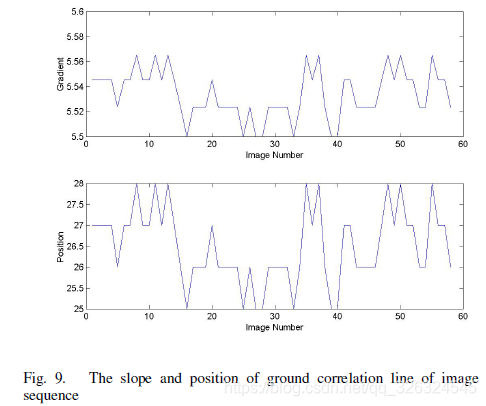
The change of slope is very small, the difference between the greatest slope and smallest slope is merely 0.0652, which is 1.17%. Thus the assumption that the ground correlation lines under different pitch angles are parallel, is valid.
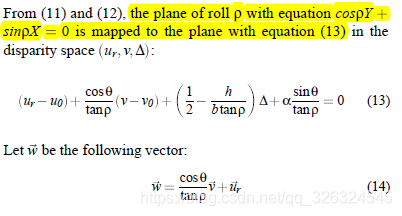
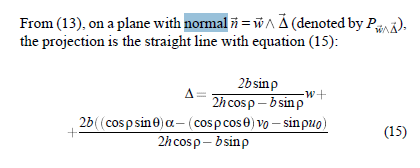
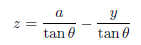
可看出是三维空间的直线(不易求解)。
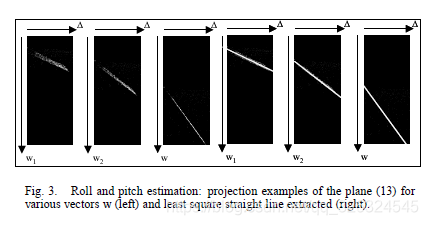
2.Roll估计
(1)在v-disparity图中利用线性相关系数判定是否是直线,进而判定roll是否为0,如果接近于1,那么roll就是0,否则不为0
(2)利用上述公式,将pitch和roll的估计转换为p,q的估计,归根到底是p的估计

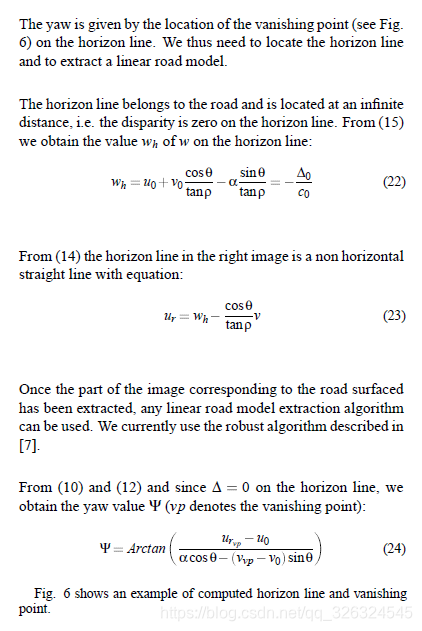
3.Yaw估计

参考
02.Real time obstacle detection on non flat road geometry through v-disparity representation
03.In-vehicle obstacles detection and characterization by stereovision
03.A single framework for vehicle roll, pitch, yaw estimation and obstacles detection by stereovision
13.Complex ground plane detection based on V-disparity map in off-road environment
标签:
相关文章
-
无相关信息