base_local_planner源码解读
现在网上看到的对于base_local_planner的解读很多都是概念性的,或者直接翻译自英文wiki。每当打开源码的时候看到这么多类和方法真的让人头大。
现在因为工作需要对base_local_planner做自己的修改,正好也没有人做过完整的源码解读的工作,我就决定试试看。这个包比之前的robot_post_ekf大太多,不太可能每个参数声明的时候都去做解释,所以只会在程序涉及到的时候才会说明。对应的文件会用文件表示,对应的函数用粗体表示,对应的变量用斜体表示。
因为本人水平有限,在解读的过程中难免会有疏漏,欢迎在评论区交流或者直接邮箱联系我:zhxue146@foxmail.com。
base_local_planner源码解读
绪论
首先明确,navigation中的全局路径规划、局部路径规划以及恢复行为均为插件形式,这里有我写的ROS内导航插件机制的短文,最好先看一看。
navigation中的相关package
主要涉及其中三个包,其中含义如下(转载博客链接):
- nav_core:
该包定义了整个导航系统关键包的接口函数,包括base_global_planner, base_local_planner以及recovery_behavior的接口。里面的函数全是虚函数,所以该包只是起到规范接口的作用,真正功能的实现在相应的包当中。之后添加自己编写的全局或局部导航算法也需要在这里声明
- move_base
这个是整个navigation stack当中进行宏观调控的看得见的手。它主要干的事情是这样的:
维护一张全局地图(基本上是不会更新的,一般是静态costmap类型),维护一张局部地图(实时更新,costmap类型),维护一个全局路径规划器global_planner完成全局路径规划的任务, 维护一个局部路径规划器base_local_planner完成局部路径规划的任务。
然后提供一个对外的服务,负责监听nav_msgs::goal类型的消息,然后调动全局规划器规划全局路径,再将全局路径送进局部规划器,局部规划器结合周围障碍信息(从其维护的costmap中查询),全局路径信息,目标点信息采样速度并评分获得最高得分的轨迹(即是采样的最佳速度),然后返回速度值,由move_base发送Twist类型的cmd_vel消息上,从而控制机器人移动,完成导航任务。
- base_local_planner
完成局部窗口内的路径规划任务,机器人行动速度的具体生成在此包当中完成。目前有两种局部路径规划算法实现,一是航迹推算法(TrajectoryROS),一是动态窗口法(DWA),该包内部的默认实现是航迹推算法,但是留出了DWA的定义接口,DWA的实现在dwa_local_planner中。
用简单的话来说,move_base中会对local_planner进行声明并且调用nav_core中定义的接口函数,至于怎么具体实现,本文的情况中使用就是自带的base_local_planner。
函数调用顺序:从move_base开始
既然对于base_local_planner的声明与调用均在move_base中,那么首先进入mova_base包中去一探究竟。move_base采用actionlib机制,最好先去了解一下。
move_base_node.cpp是对于move_base.cpp的ros包装,所以直接进入move_base.cpp。关于整个move_base内部运行的顺序,请看这里,这里摘录如下:
从构造函数的actionServer 和线程函数planThread(等待executeCb通知他工作,规划一下路径,这个是global plan)
as_ = new MoveBaseActionServer(ros::NodeHandle(), "move_base", boost::bind(&MoveBase::executeCb, this, _1), false);planner_thread_ = new boost::thread(boost::bind(&MoveBase::planThread, this));
每次有goal发布的时候,都会去调用executeCb,executeCb会去调用executeCycle
进行local plan,发布cmd_vel的topic,根据小车处于的状态,进行相应的实现(会进行plan,control,clear obstacle)
因为本文讨论的是local_planner,会把精力集中在move_base对local_planner的调用上。在move_base.cpp的构造函数中129-132行声明local_planner、初始化并设定全局cost_map:
tc_ = blp_loader_.createInstance(local_planner);ROS_INFO("Created local_planner %s", local_planner.c_str());tc_->initialize(blp_loader_.getName(local_planner), &tf_, controller_costmap_ros_);tc_->setGlobalCostmap(planner_costmap_ros_);
reconfigureCB中的tc_是用来动态修改参数的,相当于重新声明local_planner,与构造函数中形式一样。因此重点在executeCycle上,其中tc_分别出现了三次,如下:
//第821行,较为简单,单纯的清除上一次全局规划并且设定为新的全局规划if(!tc_->setPlan(*controller_plan_)){//第856行,简单,返回是否到达终点的flagif(tc_->isGoalReached()){//第882行,计算计划和速度的重点if(tc_->computeVelocityCommands(cmd_vel)){
现在,整个move_base中对local_planner的调用顺序已经清晰,让我们回到正题,看看base_local_planner是怎么实现的。
构造函数与初始化
首先先看看英文wiki中如何使用base_local_planner:
#include
#include
#include ...tf::TransformListener tf(ros::Duration(10));
costmap_2d::Costmap2DROS costmap("my_costmap", tf);base_local_planner::TrajectoryPlannerROS tp;
首先生成在trajectory_planner_ros.cpp中的base_local_planner::TrajectoryPlannerROS实例tp,base_local_planner::TrajectoryPlannerROS是对base_local_planner::TrajectoryPlanner的ROS包装。
在生成实例的过程中声明一些变量,最重要的是参数如下:
WorldModel* world_model_; //控制器将会使用的世界模型TrajectoryPlanner* tc_; //轨迹控制器本体,同时也声明了许多许多个将要用的参数,简直没法展开说,要用的时候再说吧
轨迹控制器本体在trajectory_planner.cpp中,这里真正的涉及到了轨迹的生成与计算,以后我们会再见到它。
tp.initialize("my_trajectory_planner", &tf, &costmap);
我们可以对比move_base.cpp129-132行:
tc_ = blp_loader_.createInstance(local_planner);ROS_INFO("Created local_planner %s", local_planner.c_str());tc_->initialize(blp_loader_.getName(local_planner), &tf_, controller_costmap_ros_);//多了这一句,在nav_core中定义这个虚函数,然而base_local_planner并没有重载,所以这里并没有意义。tc_->setGlobalCostmap(planner_costmap_ros_);
从initialize开始真正的base_local_planner,即trajectory_planner_ros.cpp第84-245行。首先将会是很多很多的参数读取以及纠正不科学的参数。在读取这些参数以后,我们终于开始正式生成轨迹和评价。
在第230行正式对base_local_planner进行声明:
tc_ = new TrajectoryPlanner(*world_model_, *costmap_, footprint_spec_,acc_lim_x_, acc_lim_y_, acc_lim_theta_, sim_time, sim_granularity, vx_samples, vtheta_samples, pdist_scale,gdist_scale, occdist_scale, heading_lookahead, oscillation_reset_dist, escape_reset_dist, escape_reset_theta, holonomic_robot,max_vel_x, min_vel_x, max_vel_th_, min_vel_th_, min_in_place_vel_th_, backup_vel,dwa, heading_scoring, heading_scoring_timestep, meter_scoring, simple_attractor, y_vels, stop_time_buffer, sim_period_, angular_sim_granularity);
其构造函数在trajectory_planner_ros.cpp第141-172行,将许多flag定义为false,之后是187行:
costmap_2d::calculateMinAndMaxDistances(footprint_spec_, inscribed_radius_, circumscribed_radius_);
计算了costmap中需要使用的内接圆与外切圆半径。至此,构造函数与初始化结束。
速度与路径计算:setPlan
setPlan在trajectory_planner_ros.cpp中的第372-第525行,在这里将会计算机器人实际运行的速度,发布局部路径规划,可以说是base_local_planner的核心,接下来我会放慢点节奏,好好咀嚼这里。
首先将机器人的姿态以及全局路径规划转换到global_frame_上。
if (!costmap_ros_->getRobotPose(global_pose)) {return false;}std::vector transformed_plan;//get the global plan in our frameif (!transformGlobalPlan(*tf_, global_plan_, global_pose, *costmap_, global_frame_, transformed_plan)) {ROS_WARN("Could not transform the global plan to the frame of the controller");return false;}
第395-419行,得到机器人当前速度以及终点的(x,y, θ theta θ)。第422-473行,查看机器人是否到达终点,如果到达了,就让机器人停下来。第475-478行:
//将全局路径拷贝进来,并认为全军路径的最后一个点就是终点。tc_->updatePlan(transformed_plan);//计算应该跟随什么轨迹,给定当前机器人位置和朝向,计算机器人应该跟随的好轨迹。Trajectory path = tc_->findBestPath(global_pose, robot_vel, drive_cmds);
findBestPath在trajectory_planner.cpp中第906至第977行,终于我们开始正式计算轨迹以及速度分量,将函数摘抄如下:
//计算应该跟随什么轨迹,给定当前机器人位置和朝向,计算机器人应该跟随的好轨迹。Trajectory TrajectoryPlanner::findBestPath(tf::Stamped global_pose, tf::Stamped global_vel,tf::Stamped& drive_velocities){//将当前机器人位置和方向转变成float形式的向量Eigen::Vector3f pos(global_pose.getOrigin().getX(), global_pose.getOrigin().getY(), tf::getYaw(global_pose.getRotation()));Eigen::Vector3f vel(global_vel.getOrigin().getX(), global_vel.getOrigin().getY(), tf::getYaw(global_vel.getRotation()));//重置地图path_map_.resetPathDist();goal_map_.resetPathDist();//暂时移走机器人footprint上的障碍物std::vector footprint_list =footprint_helper_.getFootprintCells(pos,footprint_spec_,costmap_,true);//将初始footprint上的所有cell标记for (unsigned int i = 0; i < footprint_list.size(); ++i) {path_map_(footprint_list[i].x, footprint_list[i].y).within_robot = true;}//确保我们根据全局计划更新map并且计算代价path_map_.setTargetCells(costmap_, global_plan_);goal_map_.setLocalGoal(costmap_, global_plan_);ROS_DEBUG("Path/Goal distance computed");//找到代价最低的轨迹。输入分别是目前机器人位置,速度以及加速度限制,生成诸多可能轨迹,选取其中打分最高的。这里也就是最关键的一步。Trajectory best = createTrajectories(pos[0], pos[1], pos[2],vel[0], vel[1], vel[2],acc_lim_x_, acc_lim_y_, acc_lim_theta_);ROS_DEBUG("Trajectories created");/*//If we want to print a ppm file to draw goal distchar buf[4096];sprintf(buf, "base_local_planner.ppm");FILE *fp = fopen(buf, "w");if(fp){fprintf(fp, "P3n");fprintf(fp, "%d %dn", map_.size_x_, map_.size_y_);fprintf(fp, "255n");for(int j = map_.size_y_ - 1; j >= 0; --j){for(unsigned int i = 0; i < map_.size_x_; ++i){int g_dist = 255 - int(map_(i, j).goal_dist);int p_dist = 255 - int(map_(i, j).path_dist);if(g_dist < 0)g_dist = 0;if(p_dist < 0)p_dist = 0;fprintf(fp, "%d 0 %d ", g_dist, 0);}fprintf(fp, "n");}fclose(fp);}*/// 如果最后打分如果小于0,说明所有的路径都不可用if(best.cost_ < 0){drive_velocities.setIdentity();}else{tf::Vector3 start(best.xv_, best.yv_, 0);drive_velocities.setOrigin(start);tf::Matrix3x3 matrix;matrix.setRotation(tf::createQuaternionFromYaw(best.thetav_));drive_velocities.setBasis(matrix);}return best;}
轨迹返回:createTrajectories
createTrajectories是整个dwa_local_controller以及base_local_controller的关键,它在trajectory_planner_ros第535-第902行。
首先第539-第560行,读取数据,设定这一次仿真中可以到达的最大线速度和角速度。
第563-第569行,首先根据vx速度以及 θ theta θ的采样数,分别计算出每一次线速度和角速度的变化值dvx和dvtheta。并把最小的vx、vy、v θ theta θ作为初始采样。
第584-第645行,如果机器人没有在逃离,首先假设机器人会向前,那么按照按照顺序对所有采样到的vx,对每一个vx都去尝试v θ theta θ使用generateTrajectory生成轨迹并打分,保留分数最高的轨迹。如果是柔性机器人那么还有vy方向的采样和打分。第655-第697行,机器人不向前只旋转的情况下,对这些轨迹进行打分。保留下分数最高的轨迹。
第700-第846行,检查最优轨迹的分数是否大于0,也就是正常。如果正常的话,那么为了抑制震荡影响,当机器人在某方向移动时,对下一个周期的与其相反方向标记为无效,直到机器人从标记震荡的位置处离开一定距离,(声明与定义在trajectory_planner.h中第271-第275行),返回最佳轨迹。
最后,当最优轨迹不可用时,就让机器人缓慢退后。
轨迹生成与打分:generateTrajectory
现在来看看怎么具体生成轨迹并打分的,该函数定义在trajectory_planner.h中第247-249行,连带说明如下:
//double vx_samp, double vy_samp, double vtheta_samp//分别为这次采样中使用的vx, yv, vtheta,生成的轨迹以引用的形式传回。void generateTrajectory(double x, double y, double theta, double vx, double vy, double vtheta, double vx_samp, double vy_samp, double vtheta_samp, double acc_x, double acc_y,double acc_theta, double impossible_cost, Trajectory& traj);
这一部分可以说是base_local_planner的核心,所以我全部拷贝过来,慢慢做解释:
void TrajectoryPlanner::generateTrajectory(double x, double y, double theta,double vx, double vy, double vtheta,double vx_samp, double vy_samp, double vtheta_samp,double acc_x, double acc_y, double acc_theta,double impossible_cost,Trajectory& traj) {// 确保运行一半的时候参数不会改变boost::mutex::scoped_lock l(configuration_mutex_);//记录初始时刻的x、y、theta、vx、vy、vthetadouble x_i = x;double y_i = y;double theta_i = theta;double vx_i, vy_i, vtheta_i;vx_i = vx;vy_i = vy;vtheta_i = vtheta;//计算速度的模double vmag = hypot(vx_samp, vy_samp);//计算仿真的步数int num_steps;if(!heading_scoring_) {num_steps = int(max((vmag * sim_time_) / sim_granularity_, fabs(vtheta_samp) / angular_sim_granularity_) + 0.5);} else {num_steps = int(sim_time_ / sim_granularity_ + 0.5);}//我们希望至少有一步,即使一步都没有,我们也希望能为当前位置打分if(num_steps == 0) {num_steps = 1;}double dt = sim_time_ / num_steps;double time = 0.0;//创造一个潜在的轨迹traj.resetPoints();traj.xv_ = vx_samp;traj.yv_ = vy_samp;traj.thetav_ = vtheta_samp;traj.cost_ = -1.0;//初始化这个轨迹的costdouble path_dist = 0.0;double goal_dist = 0.0;double occ_cost = 0.0;double heading_diff = 0.0;for(int i = 0; i < num_steps; ++i){unsigned int cell_x, cell_y;//不希望路径跑出已知地图if(!costmap_.worldToMap(x_i, y_i, cell_x, cell_y)){traj.cost_ = -1.0;return;}//检查当前点路径的合法性double footprint_cost = footprintCost(x_i, y_i, theta_i);//如果遇到了障碍物,那么会返回一个负数if(footprint_cost < 0){traj.cost_ = -1.0;return;//更新occ_costocc_cost = std::max(std::max(occ_cost, footprint_cost), double(costmap_.getCost(cell_x, cell_y)));//如果只是想简简单单的跟随终点的话,这里调整为true即可if (simple_attractor_) {goal_dist = (x_i - global_plan_[global_plan_.size() -1].pose.position.x) *(x_i - global_plan_[global_plan_.size() -1].pose.position.x) +(y_i - global_plan_[global_plan_.size() -1].pose.position.y) *(y_i - global_plan_[global_plan_.size() -1].pose.position.y);} else {bool update_path_and_goal_distances = true;// 是否为朝向打分?if (heading_scoring_) {if (time >= heading_scoring_timestep_ && time < heading_scoring_timestep_ + dt) {heading_diff = headingDiff(cell_x, cell_y, x_i, y_i, theta_i);} else {update_path_and_goal_distances = false;}}if (update_path_and_goal_distances) {//更新路径与目标的距离path_dist = path_map_(cell_x, cell_y).target_dist;goal_dist = goal_map_(cell_x, cell_y).target_dist;//如果一个路径上的点没法明确到达在终点,他就是无效的if(impossible_cost <= goal_dist || impossible_cost <= path_dist){
// ROS_DEBUG("No path to goal with goal distance = %f, path_distance = %f and max cost = %f",
// goal_dist, path_dist, impossible_cost);traj.cost_ = -2.0;return;}}}//这个点有效,加入轨迹traj.addPoint(x_i, y_i, theta_i);//计算速度vx_i = computeNewVelocity(vx_samp, vx_i, acc_x, dt);vy_i = computeNewVelocity(vy_samp, vy_i, acc_y, dt);vtheta_i = computeNewVelocity(vtheta_samp, vtheta_i, acc_theta, dt);//计算位置x_i = computeNewXPosition(x_i, vx_i, vy_i, theta_i, dt);y_i = computeNewYPosition(y_i, vx_i, vy_i, theta_i, dt);theta_i = computeNewThetaPosition(theta_i, vtheta_i, dt);//增加时间time += dt;} double cost = -1.0;//更新costif (!heading_scoring_) {cost = pdist_scale_ * path_dist + goal_dist * gdist_scale_ + occdist_scale_ * occ_cost;} else {cost = occdist_scale_ * occ_cost + pdist_scale_ * path_dist + 0.3 * heading_diff + goal_dist * gdist_scale_;}traj.cost_ = cost;}
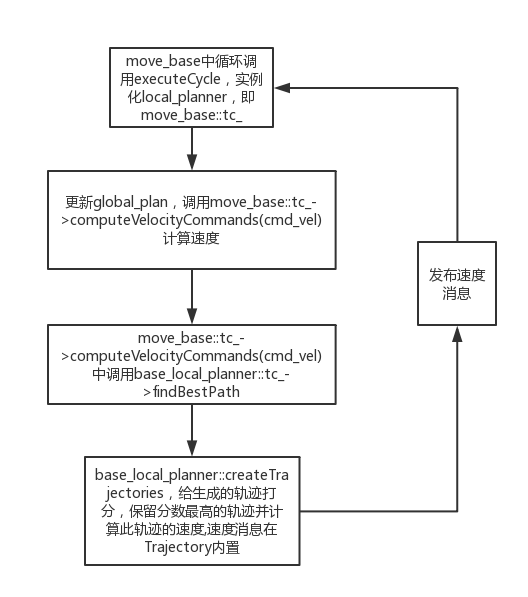
总结与梳理
至此,整个计算过程结束。接下来会用流程图明确到底如何计算出速度的:
标签:
相关文章
-
无相关信息