Velocity measurement in automotive sensing: How FMCW radar and lidar can work together
目录
Velocity measurement in automotive sensing: How FMCW radar and lidar can work together-汽车传感中的速度测量:FMCW雷达和激光雷达如何协同工作
Abstract
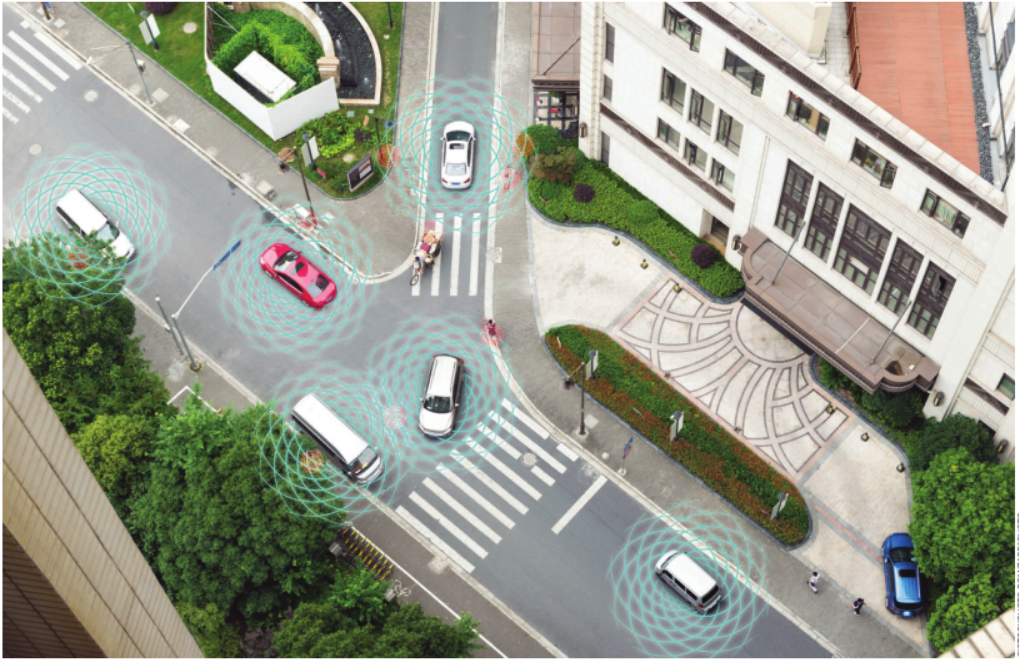
A radar may not provide a clear image, but it will capture the oncoming motion of multiple vehicles separated in range, velocity, and azimuth angle.-雷达可能无法提供清晰的图像,但它可以捕捉到在距离、速度和方位角上分离的多辆车迎面而来的运动。
Active sensing of velocity-主动速度感知
The ability of a system to resolve a frequency shift depends on the duration over which the signal is analyzed-系统分辨频率漂移的能力取决于信号被分析的持续时间。
Key differences-关键不同点
Despite the effectiveness of automotive radar, significant effort in recent years has been aimed at improving its angular resolution for more challenging AV use cases.-尽管汽车雷达是有效的,但近年来,人们一直致力于提高其角度分辨率,以应对更具挑战性的自动驾驶情景。
Better together-一起更好
Read more about it:
Velocity measurement in automotive sensing: How FMCW radar and lidar can work together-汽车传感中的速度测量:FMCW雷达和激光雷达如何协同工作
Abstract
Autonomous vehicles (AVs) depend on an intricate network of camera, radar, lidar, and inertial sensors to navigate safely.Discussing the merits and drawbacks of individual sensors is one of the more consistent “water-cooler topics” in the autonomous driving industry.Although this sensor face-off is entertaining, it is sometimes more useful to consider how two sensors can work together. I will discuss two sensors that can directly sense velocity in the context of future AV capability.自动驾驶汽车(AVs)依靠复杂的摄像头、雷达、激光雷达和惯性传感器网络来安全导航。讨论单个传感器的优点和缺点是自动驾驶行业中十分一致的“冷话题”之一。尽管这种传感器对峙很有趣,但考虑两个传感器如何协同工作有时更有用。我将讨论在未来自动驾驶技术能力的背景下可以直接感知速度的两个传感器。
A radar may not provide a clear image, but it will capture the oncoming motion of multiple vehicles separated in range, velocity, and azimuth angle.-雷达可能无法提供清晰的图像,但它可以捕捉到在距离、速度和方位角上分离的多辆车迎面而来的运动。
Many scenarios benefit from the direct velocity measurement of moving objects. This is traditionally supported by frequency-modulated continuous-wave (FMCW) radar systems—now common inconsumer-vehicle advanced driverassistance systems applications. Automotive radar systems are low cost, reliable in nearly all weather conditions, can see to long distances, and provide accurate target velocity information. They support key functionalities, such as automatic cruise control and blind-spot detection.许多场景得益于移动物体的直接速度测量。这在传统上由调频连续波(FMCW)雷达系统支持消费者车辆高级驾驶辅助系统应用。汽车雷达系统成本低,在几乎所有天气条件下都是可靠的,可以远距离观察,并提供准确的目标速度信息。它们支持关键功能,如自动巡航控制和盲点检测。Consider the following relatable driving scenario (Fig. 1): You are preparing to take a “blind” left-hand turn onto a convex street. You lean forward to catch glimpses of oncoming traffic obscured by a row of trees. You inch your car forward into the road, eventually rely on a gut feeling that the coast is clear, and make the turn.考虑以下相关的驾驶场景(图1):你正准备在一条凸形街道上“盲目”左转。你身体前倾,瞥见被一排树木遮挡的迎面而来的车辆。你慢慢地把车开到路上,最终凭直觉认为前方没有危险,然后转弯。图一,一种常见的驾驶场景:在迎面而来的车辆上无保护地左转。
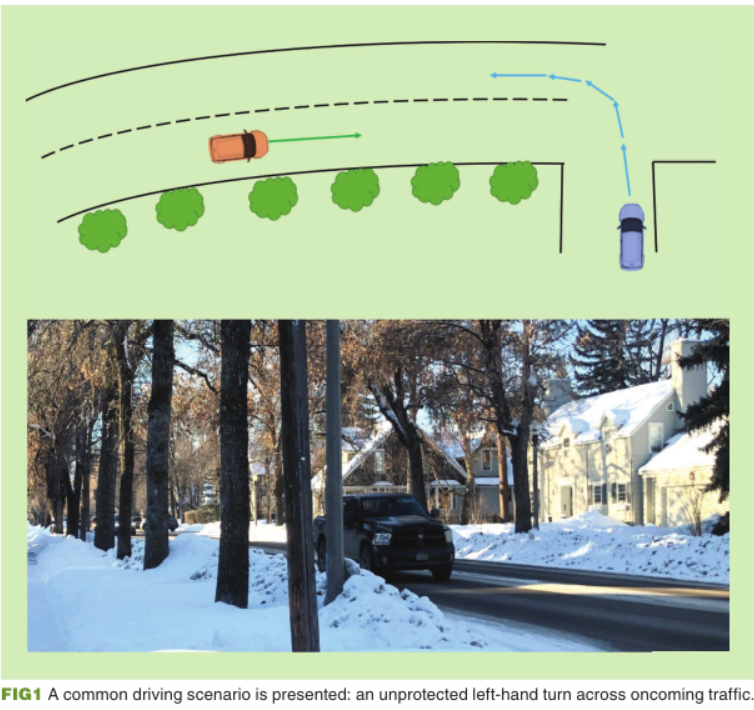
This scenario is a fixture of my daily commute. Sometimes (as Fig 1.suggests), the road is icy, which adds to the risk. Safe navigation relies on a vast amount of contextual understanding and experience. Figure 1 shows an oncoming truck clearly, but what about the second car oncoming to the left, headlights on either side of a tree? Would a camerabased system on an AV catch that?
这种场景是我日常通勤的固定场景。有时(如图1),道路结冰,这增加了风险。安全驾驶依赖于大量的驾驶理解和经验。图1清楚地显示了一辆迎面而来的卡车,但是第二辆迎面而来的车呢?自动驾驶系统上的摄像头系统能捕捉到吗?
Active sensing of velocity-主动速度感知
Many AV developers place side-look radars near the front bumper of the car to tackle scenarios just like that shown in Fig. 1. A radar may not provide a clear image, but it will capture the oncoming motion of multiple vehicles separated in range, velocity, and azimuth angle. This is enough to signal caution about the left hand turn and clearly demonstrates the value of direct velocity measurement.No inference about those headlights on either side of the tree is required.
许多自动驾驶汽车开发人员将侧视雷达放置在汽车前保险杠附近,以解决如图1所示的场景。雷达可能不能提供清晰的图像,但它可以捕捉到在距离、速度和方位角上分离的多个车辆的迎面而来的运动。这足以提醒人们注意左转,并清楚地表明了直接速度测量的价值。不需要根据树两边的车灯来推断交通情况。
The FMCW approach in radar is well known. To range the target, the frequency of the transmitted radar signal is linearly modulated around some ca r r ier frequency (2 4 GH z, 77 GHz, and so on). The backscattered radiation from targets is then down-mixed with a local oscillator to produce radio-frequency signals in the band of a digitizer.The resultant time-series data contains so-called beat frequencies that correspond to the range of different targets in the scene. Velocity is measured by analyzing multiple such range measurements over time. The angle is extracted by analyzing the phase at specific range–velocity values across a small antenna array.
For further technical discussion, the Texas Instruments application notes are recommended reading.
雷达中的FMCW方法是众所周知的。为了瞄准目标,发射的雷达信号的频率被线性调制到某个相对频率(2 4 GHz, 77 GHz,等等)。然后,来自目标的后向散射辐射与本地振荡器向下混合,在数字化仪的波段内产生射频信号。由此产生的时间序列数据包含所谓的节拍频率,对应于场景中不同目标的范围。速度是通过分析多次这样的距离测量随时间的变化来测量的。通过分析小天线阵列上特定距离-速度值下的相位来提取角度。
有关进一步的技术讨论,建议阅读德州仪器应用说明。
Recently, several start-ups have promoted FMCW lidar technology.In many ways, the measurement physics are similar. A transmitted optical carrier is frequency modulated to support target ranging. Of course, the carrier frequency is substantially larger than an automotive radar system (192.5 THz for a 1550-nm light source).The range resolution in both cases depends on the modulation b a nd w idt h of the radar or lidar signal and is independent of the carrier frequency.
Velocity in the lidar case is also extracted through additional signal analysis. A ngle is easily estimated by tracking the steering of a laser scanning mechanism.
最近,几家初创公司都在推广FMCW激光雷达技术。在许多方面,测量物理是相似的。发射光载波是调频的,以支持目标测距。当然,载频远远大于汽车雷达系统(1550nm光源为192.5 THz)。
在这两种情况下,距离分辨率取决于雷达或激光雷达信号的调制b和w,而与载波频率无关。激光雷达情况下的速度也通过额外的信号分析提取。通过跟踪激光扫描机构的转向,可以很容易地估计出角度。
The two data products are similar in many respects.
Both radar and lidar produce a list of discrete spatial, velocity, and intensity values— the point cloud. The velocity measurement in both cases corresponds to just the radial component of the relative sensor-target motion. An example of such a lidar point cloud is shown in Fig. 2.
这两个数据产品在许多方面是相似的。
雷达和激光雷达都会产生一系列离散的空间、速度和强度值,即点云。两种情况下的速度测量都对应于相对传感器-目标运动的径向分量。这种激光雷达点云的一个例子如图2所示。
图2
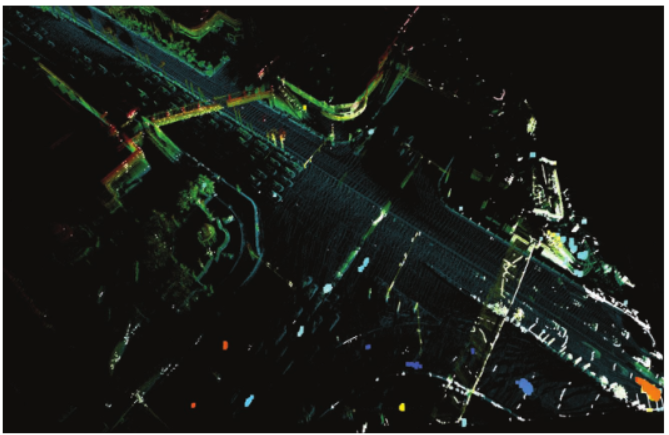
高分辨率激光雷达地图的俯视图(也是用激光雷达制作的)根据高度着色。一帧激光雷达数据被叠加,并根据径向速度着色:白色是静态的,蓝色是迎面而来的,红色是后退的。传感器位于场景的左下角。
The ability of a system to resolve a frequency shift depends on the duration over which the signal is analyzed-系统分辨频率漂移的能力取决于信号被分析的持续时间。
Key differences-关键不同点
Angular and velocity resolution differences in FMCW radar and lidar can be tied to the carrier wavelength/frequency of the source. The standard automotive radar frequencies (24 GHz, 77 GHz, and so on) have a wavelength of a few millimeters. FMCW lidar is typically implemented at the 1.5-nm wavelength (192.5-THz frequency) due to the availability of optical fiber components in the optical C-band.FMCW雷达和激光雷达的角分辨率和速度分辨率的差异可能与源的载波波长/频率有关。标准的汽车雷达频率(24 GHz、77 GHz等)的波长为几毫米。由于c波段光纤组件的可用性,FMCW激光雷达通常在1.5 nm波长(192.5-THz频率)实现。The angular resolution of either system is a function of the wavelength as well as the antenna or aperture size. A quick calculation indicates that large antennas are required for the automotive radar system to achieve comparable resolution to a lidar system. Even for a narrow horizontal field-of-view radar, for which larger than m/2 antenna spacing may be acceptable, dozens of antennas would have to be phased and processed to achieve this resolution. A lidar system can achieve good angular resolution in both azimuth and elevation with compact optics, but a radar system would require a large 2D antenna array: ~ ./D 0 1 res "i m^ h -degree radar angular resolution requires a ~2-m antenna and ~ ./D 0 1 res "i m^ h -degree lidar angular resolution requires a <1-mm aperture.两种系统的角分辨率都是波长以及天线或孔径大小的函数。快速计算表明,汽车雷达系统需要大天线才能实现与激光雷达系统相当的分辨率。即使对于狭窄的水平视场雷达,天线间距大于m/2可能是可以接受的,几十个天线也必须进行相位和处理才能达到这一分辨率。激光雷达系统可以通过紧凑的光学系统在方位角和仰角上获得良好的角分辨率,但是雷达系统需要一个大的二维天线阵列:激光雷达的角分辨率需要一个<1 mm的孔径。The angular resolution depends on the wavelength,λ ,m and the antenna/aperture dimension, .角分辨率取决于波长λ,m和天线/孔径尺寸D。The Doppler effect will induce a frequency shift of the received signal that depends on both the carrier frequency and the radial velocity. The ability of a system to resolve a frequency shift depends on the duration over which the signal is analyzed. This is illustrated in the calculation and highlights the need for different signal processing for radar and lidar sig na ls多普勒效应会引起接收信号的频移,频移取决于载波频率和径向速度。系统分辨频率漂移的能力取决于信号被分析的持续时间。计算中说明了这一点,并强调了雷达和激光雷达信号需要不同的信号处理Despite the effectiveness of automotive radar, significant effort in recent years has been aimed at improving its angular resolution for more challenging AV use cases.-尽管汽车雷达是有效的,但近年来,人们一直致力于提高其角度分辨率,以应对更具挑战性的自动驾驶情景。
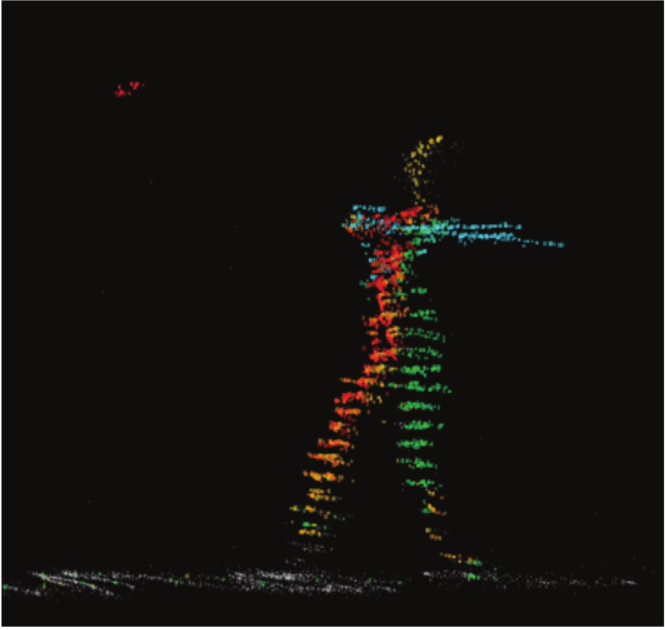
With these differences in mind, FMCW lidar would seem to have clear latency and angular-resolution advantages, and Fig. 3 best highlights this notion. One may even be tempted to ask how automotive radar works as well as it does. The answer lies in the sparsity of the range–velocity space resolved by an automotive radar system—that is, targets don’t often appear at the same distance and velocity. This sparsity tends to isolate objects and allow beamforming algorithms to successfully estimate the angle of any given the target. Aside from the important case in which static object velocity and angle estimates are redundant, this angle estimation step is critical to object tracking.考虑到这些差异,FMCW激光雷达似乎具有明显的延迟和角度分辨率优势,图3最好地突出了这一概念。人们甚至可能会问,汽车雷达是如何工作的。答案在于汽车雷达系统所解决的距离-速度空间的稀疏性,也就是说,目标通常不会出现在相同的距离和速度上。这种稀疏性倾向于隔离物体,并允许波束形成算法成功地估计任何给定目标的角度。除了静态物体速度和角度估计是冗余的重要情况外,这个角度估计步骤对物体跟踪是至关重要的。图3
一帧激光雷达数据捕捉到了棒球运动员的摇摆状态。数据按速度场着色:蓝色表示接近,红色表示后退。
球、球棒和击球手躯干的旋转都被捕捉到精细的空间细节。
Better together-一起更好
Despite the effectiveness of automotive radar, significant effort in recent years has been aimed at improving its angular resolution for more challenging AV use cases. As a first step, designers have worked to support resolution in elevation, not just azimuth. Second, large r antenna arrays synthesized through clever combinations of transmit and receive elements have also improved angular resolution.
This technique is often referred to as multiple-input, multiple-output (MIMO) radar.
尽管汽车雷达是有效的,但近年来,人们一直致力于提高其角度分辨率,以应对更具挑战性的自动驾驶情况。作为第一步,设计师努力支持仰角分辨率,而不仅仅是方位角分辨率。其次,通过巧妙组合发射和接收元件合成的大型天线阵列也提高了角度分辨率。
这种技术通常被称为多输入多输出(MIMO)雷达。
Although MIMO can be very effective at improving angular resolution, it does complicate the beamforming algorithms. These algorithms relyon the analysis of complex (amplitude and phase) responses at a given range–velocity location across the set of antenna elements in the synthesized antenna array. Changes in the path length of the antennas (often generated by temperature variation) can significantly reduce the performance of such techniques and may even generate inaccurate angle estimates. Efforts to calibrate such techniques can involve expensive test rigs, temperature characterization, and vehicle-mounting considerations. Furthermore, these efforts don’t often involve dynamic realworld targets. Enter FMCW lidar.虽然MIMO可以非常有效地提高角分辨率,但它确实使波束形成算法复杂化。这些算法依赖于分析合成天线阵列中天线单元在给定距离-速度位置上的复杂(振幅和相位)响应。天线路径长度的变化(通常由温度变化产生)会显著降低这种技术的性能,甚至可能产生不准确的角度估计。校准这些技术的努力可能涉及昂贵的试验、温度表征和车辆安装方面的考虑。此外,这些努力通常不涉及动态的现实目标。进入FMCW激光雷达。FMCW lidar data can be registered to radar data to provide dual perspectives of the same spatialplus-radial-velocity view of the world (Fig. 2). In a sense, the FMCW data can provide a “right answer” for the radar to use in online calibration.
Not only can MIMO beamforming algorithms be better tuned, they can be validated across large environmental and situational variables with little additional processing.
FMCW激光雷达数据可以检测到雷达数据,以提供相同空间+径向-速度世界视图的双重视角(图2)。在某种意义上,FMCW数据可以为雷达在线校准提供一个“正确答案”。
MIMO波束形成算法不仅可以得到更好的调优,而且可以在大的环境和情景变量中进行验证,只需很少的额外处理。
The clear input from the FMCW lidar may also allow radar signals to be better correlated to specific objects or activity in a fully automated learning workflow. This would greatly support radar-only object identification through the use of micro-Doppler signatures (that is, radar-wheelspin or pedestrian-gait signatures). In addition to countless academic papers on micro-Doppler, MathWorks provides a nice tutorial.来自FMCW激光雷达的清晰输入也可以使雷达信号在完全自动化的学习工作流程中更好地与特定物体或活动相关联。这将极大地支持通过使用微多普勒特征(即雷达车轮旋转或行人步态特征)进行雷达对象识别。除了无数关于微多普勒的学术论文,MathWorks还提供了一个很好的教程。The result of this sensor cooperation is a redundant data feed that directly informs the vehicle aboutwhere objects are located and how they are moving with very high confidence and low-level data fusion. The radar becomes a better calibrated sensor for situations in which lidar performance may suffer, such as a torrential downpour.Meanwhile, the fused-point cloud data bandwidth would likely remain at less than 100 MB—a fraction of modern AV camera requirements.
这种传感器合作的结果是一个冗余数据馈送,直接通知车辆对象的位置以及它们如何移动,具有非常高的置信度和低水平的数据融合。在激光雷达性能可能受到影响的情况下,例如大雨情况下,雷达成为一个更好的校准传感器。与此同时,融合云数据带宽可能会保持在100 mb以下,这只是现代自动驾驶摄像机需求的一小部分。
As a developer of FMCW lidar, I am often asked, “Will your lidar replace radar?” I would ask a different question: “How can FMCW lidar make radar better?”作为FMCW激光雷达的开发人员,我经常被问到:“你们的激光雷达会取代雷达吗?”我会问一个不同的问题:“FMCW激光雷达如何使雷达更好?”Read more about it:
• Texas Instruments, “mmWave AWR—technical documents.” [On-line]. Available: http:/ /www.ti.com/sensors/mmwave/awr/technical -documents.html
• MathWorks, “Introduction to micro-Doppler effects.” [Online]. Avail-able: https:/ /www.mathworks.com/help/phased/examples/introduction -to-micro-doppler-effects.html
About the author:
Stephen Crouch (crouch@black moreinc.com) earned his B.S. and M.S. degrees in physics from Stevens Institute of Technology, Hoboken, New Jersey, and his M.S. degree in applied physics from Montana State University, Bozeman, where he completed his thesis, “Synthetic Aperture Ladar Techniques.” He began his career as a radar systems engineer at Delphi Automotive in Malibu, California, and subsequently returned to Bozeman, Montana, where he cofounded Blackmore Sensors and Analytics, Inc., and served as the chief technical officer.
He joined Aurora Innovation’s team following their acquisition of Blackmore in 2019.
斯蒂芬·克劳奇(crouch@black moreinc.com)在新泽西州霍博肯史蒂文斯理工学院获得物理学学士和硕士学位,在蒙大拿州立大学博兹曼获得应用物理学硕士学位,在那里他完成了他的论文“合成孔径雷达技术”。他的职业生涯始于位于加利福尼亚州马里布的德尔福汽车公司(DelphiAutomotive)的雷达系统工程师,随后回到蒙大拿州博兹曼,在那里他共同创立了Blackmore Sensors and Analytics, Inc.,并担任首席技术官。
他在2019年收购Blackmore后加入了Aurora Innovation的团队。
标签:
相关文章
-
无相关信息