ROS学习笔记6 —— TF的使用
文章目录
1. tf数据类型1
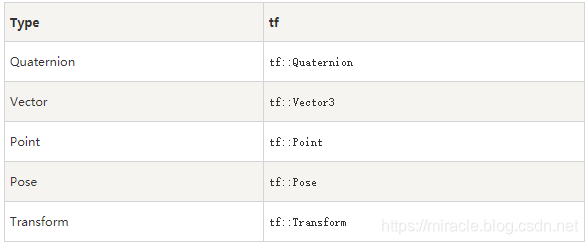
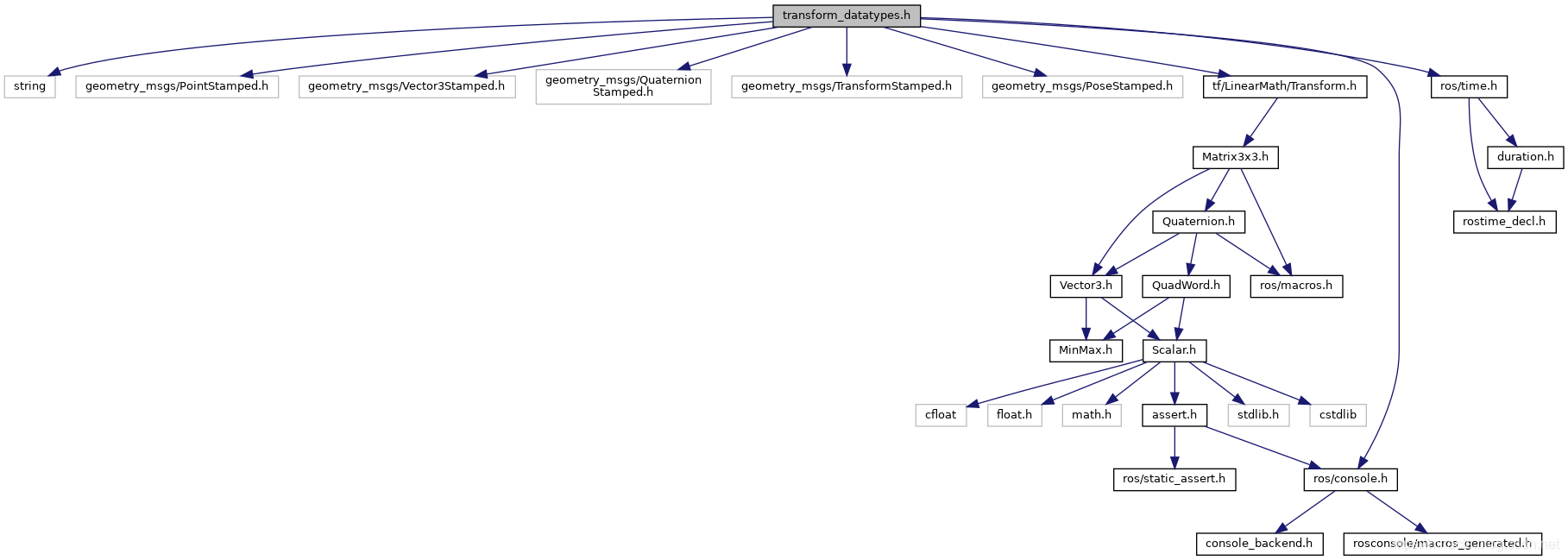
在tf/transform_datatypes.h中定义,基本数据类型有:Quaternion, Vector, Point, Pose, Transform
2. tf坐标变换2
Frame是坐标系统,在ROS里都是以3D形式存在,右手原则,X向前,Y向左,Z向上
Points在坐标系以tf::Point形式表达,等同与bullet类型的btVector3
在坐标系W里,坐标的点p,可以用:Wp
3. tf广播变换3
void sendTransform(const StampedTransform & transform);
void sendTransform(const geometry_msgs::TransformStamped & transform);
4. 使用已发布的变换4
核心方法:
(4)waitForTransform() 函数
返回bool值,评估变换是否有效
(5)lookupTransform() 函数
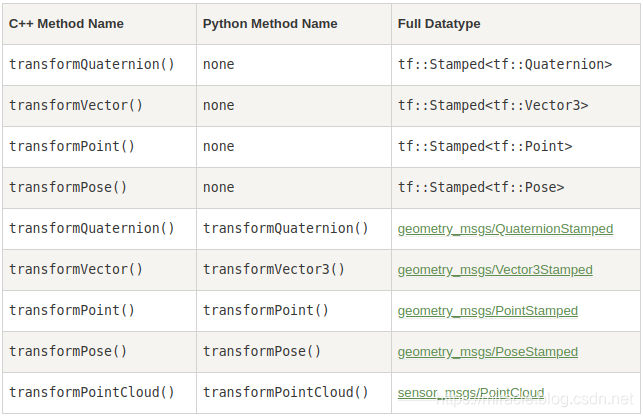
transformDATA 方法
tf::TransformListener类的主要目的是在坐标系间进行变换数据。
5. 异常5
6. 编写tf广播6
创建的功能包需要依赖于tf、roscpp、rospy,以小乌龟Demo为例,还需要添加依赖turtlesim
// tf包提供了TransformBroadcaster的实现,以帮助使发布变换的任务更容易
// 要使用TransformBroadcaster,我们需要包含tf/transform_broadcaster.h头文件#include
#include
#includeusing namespace std;
std::string turtle_name;void poseCallback(const turtlesim::PoseConstPtr& msg)
{// TF广播器// 创建一个TransformBroadcaster对象,我们稍后将使用它通过线路发送转换static tf::TransformBroadcaster br;// 创建一个Transform对象,并将信息从2D乌龟姿势复制到3D变换中tf::Transform transform;transform.setOrigin(tf::Vector3(msg->x,msg->y,0.0));tf::Quaternion q;q.setRPY(0,0,msg->theta);// 设置旋转transform.setRotation(q);// 发布坐标变换// 使用TransformBroadcaster发送转换需要四个参数;首先传递转换对象,采用ros::Time::now()来给发布的变换一个时间戳;然后需要传递创建的链接的父框架名称,此处为“world”;最后需要传递正在创建的链接的子框架名称,此处为乌龟本身名称br.sendTransform(tf::StampedTransform(transform,ros::Time::now(),"world",turtle_name));
}int main(int argc,char** argv)
{// 初始化节点ros::init(argc, argv, "my_tf_broadcaster");if (argc != 2){ROS_ERROR("need turtle name as argument"); return -1;}turtle_name = argv[1];ros::NodeHandle node;ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);ros::spin();return 0;} 注意:sendTransform和StampedTransform具有父对象和子对象的相反顺序。
使用tf_echo工具检查位姿是否广播到tf:
rosrun tf tf_echo /world /turtle1
7. 编写tf监听器7
// tf包提供了TransformListener的实现,以帮助使接收变换的任务更容易
// 要使用TransformListener,我们需要包括tf/transform_listener.h头文件#include
#include
#include
#include int main(int argc, char** argv)
{ros::init(argc, argv, "my_tf_listener");ros::NodeHandle node;ros::service::waitForService("spawn");ros::ServiceClient add_turtle = node.serviceClient("spawn");turtlesim::Spawn srv;add_turtle.call(srv);ros::Publisher turtle_vel = node.advertise("turtle2/cmd_vel", 10);// 创建一个TransformListener对象,一旦监听器被创建,它开始接收tf转换,并缓冲它们长达10秒;TransformListener对象应该被限定为持久化,否则它的缓存将无法填充,并且几乎每个查询都将失败;一个常见的方法是使TransformListener对象成为一个类的成员变量tf::TransformListener listener;ros::Rate rate(10.0);while (node.ok()){tf::StampedTransform transform;try{// 查询监听器进行特定的转换,从/turtle2坐标系开始变换到/turtle1坐标系,变换的时间,提供ros::Time(0)即会给出最近的可用的变换,结果存放的变换对象listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);}catch (tf::TransformException &ex) {ROS_ERROR("%s",ex.what());ros::Duration(1.0).sleep();continue;}// 变换用于计算龟的新的线性和角速度,基于它与龟的距离和角度。// 新的速度发布在话题"turtle2/cmd_vel"中,turtlesim将使用它来更新turtle2的运动。geometry_msgs::Twist vel_msg;vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(), transform.getOrigin().x());vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) + pow(transform.getOrigin().y(), 2));turtle_vel.publish(vel_msg);rate.sleep();}return 0;
}; 8. 增加坐标系8
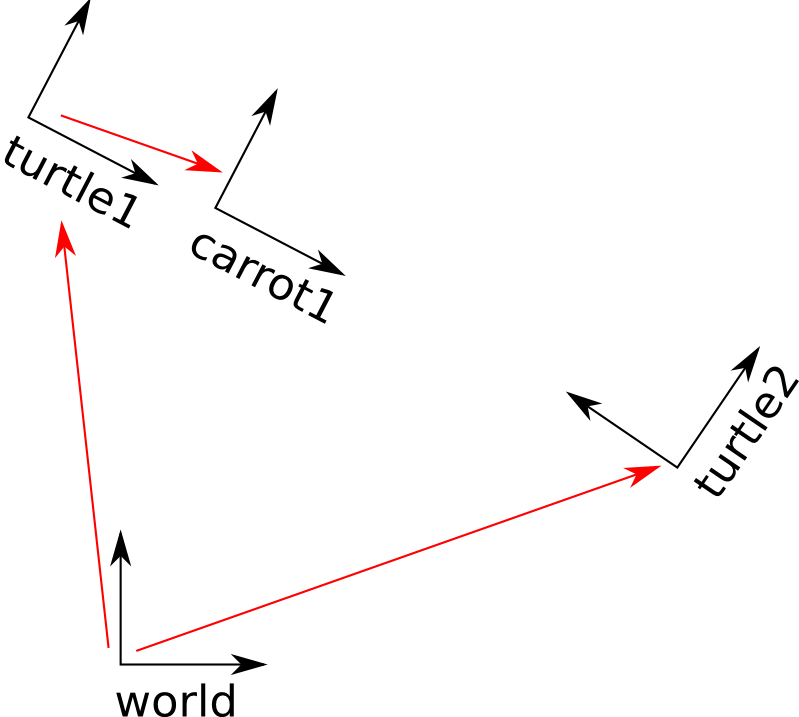
以乌龟为例子,添加一个新坐标系carrot1到turtle1
#include
#include int main(int argc, char** argv){ros::init(argc, argv, "my_tf_broadcaster");ros::NodeHandle node;tf::TransformBroadcaster br;tf::Transform transform;ros::Rate rate(10.0);while (node.ok()){创建transform,从父系turtle1到子系carrot1,carrot1离turtle1 两米远transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );transform.setRotation( tf::Quaternion(0, 0, 0, 1) );br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "turtle1", "carrot1"));rate.sleep();}return 0;
};
9. 深入Time和TF9
值得注意的是,如果只使用
lookupTransform()在运行时程序会报错,这是因为 每个监听器有一个缓冲区,它存储来自不同tf广播者的所有坐标变换。 当广播者发出变换时,变换进入缓冲区之前需要一些时间(通常是几个毫秒),所以在时间“now”请求坐标系变换时等待几毫秒再获得该信息便解决了此问题。
try{ros::Time now = ros::Time::now();listener.waitForTransform("/turtle2", "/turtle1", now, ros::Duration(3.0));listener.lookupTransform("/turtle2", "/turtle1",now, transform);
- 需要等待变换从坐标系turtle2
- 到坐标系turtle1
- 在now时间
- 超时时间,不要等待超过此最大持续时间
注意:使用ros::Time::now()是为了这个例子。通常这将是希望被转换的数据的时间戳。waitForTransform()实际上会阻塞直到两个海龟之间的变换可用(这通常需要几毫秒)或者如果变换不可用,直到达到超时。
对于真实的tf用例,使用Time(0)通常是完全正常的。
10. 时间穿梭(Time travel)10
try{ros::Time now = ros::Time::now();listener.waitForTransform("/turtle2", "/turtle1",now, ros::Duration(1.0));listener.lookupTransform("/turtle2", "/turtle1",now, transform);
同样以小乌龟Demo为例,现在,不是让turtle2去到turtle1当前时间的地方,而让turtle2去turtle1是5秒前的地方:
try{ros::Time past = ros::Time::now() - ros::Duration(5.0);listener.waitForTransform("/turtle2", "/turtle1",past, ros::Duration(1.0));listener.lookupTransform("/turtle2", "/turtle1",past, transform);
相对于/turtle2目前的位置,/turtle1 5秒前的姿势是什么?
回答该问题需要依赖于高级API,示例代码如下:
try{ros::Time now = ros::Time::now();ros::Time past = now - ros::Duration(5.0);listener.waitForTransform("/turtle2", now,"/turtle1", past,"/world", ros::Duration(1.0));listener.lookupTransform("/turtle2", now,"/turtle1", past,"/world", transform);
- 变换从坐标系turtle2
- 在now时间
- 到turtle1坐标系
- 在past时间
- 指定不随时间改变的坐标系,这里是world
- 变换结果保存的变量
https://www.ncnynl.com/archives/201702/1305.html ↩︎
https://www.ncnynl.com/archives/201702/1306.html ↩︎
https://www.ncnynl.com/archives/201702/1307.html ↩︎
https://www.ncnynl.com/archives/201702/1308.html ↩︎
https://www.ncnynl.com/archives/201702/1309.html ↩︎
https://www.ncnynl.com/archives/201702/1310.html ↩︎
https://www.ncnynl.com/archives/201702/1311.html ↩︎
https://www.ncnynl.com/archives/201702/1312.html ↩︎
https://www.ncnynl.com/archives/201702/1313.html ↩︎
https://www.ncnynl.com/archives/201702/1314.html ↩︎
标签:
相关文章
-
无相关信息